КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 12. Электропривод постоянного тока
|
|
|
|
Схема привода
Электропривод получил своё название по применённому в его схеме преобразователю подведённой энергии в механическую энергию перемещения выходного вала привода. Указанным преобразователем является электродвигатель. Другими словами, энергия электромагнитного поля преобразуется в механическую энергию.
В качестве примера рассмотрим электропривод с двигателем постоянного тока (ДПТ). Для управления ДПТ широко применяется импульсный метод регулирования скорости. Схемы импульсного управления имеют высокий к.п.д., что характерно для релейного управления, а при высокой частоте следования импульсов позволяет использовать преимущества, характерные для непрерывного управления. Привод применяется при мощностях до нескольких сот ватт.

 | | | | ||||||||||||
| |||||||||||||||
 | |||||||||||||||
 | |||||||||||||||
|
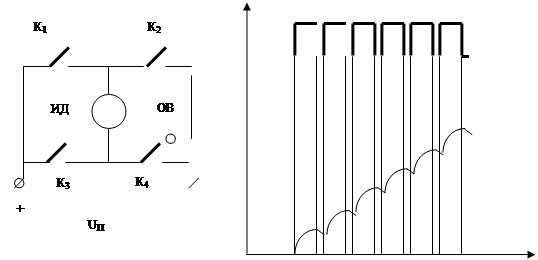
На рисунке приведена мостовая схема импульсного управления электродвигателем (ЭД). Мост составлен из четырёх ключей К1…К4. К одной диагонали моста подключено напряжение питания UП, в другую диагональ включена обмотка якоря ИД.
В исходном положении при отсутствии сигнала управления ключи К1 и К3 (или К2 и К4) замкнуты и обмотка якоря ЭД закорочена, т. е. реализуется режим динамического торможения.
При сигнале управления какого-либо знака ключ К3 - разомкнут, ключ К4 – замкнут. Ключи К1 и К2 в противофазе замыкаются со скважностью, пропорциональной сигналу управления. При замкнутом ключе К1 по якорю протекает ток управления и создаётся движущий момент. При замкнутом ключе К2 – якорь закорачивается и двигатель тормозится.
При поступлении сигнала управления противоположного знака ключ К1 - разомкнут, ключ К2 – замкнут, а ключи К3 и К4 в противофазе замыкаются. При этом по якорю течёт средний ток в противоположном направлении и создаётся движущий момент противоположного знака.
Указанный принцип управления (т. н. несимметричный закон управления) реализуется на практике довольно просто с источником пилообразного напряжения.
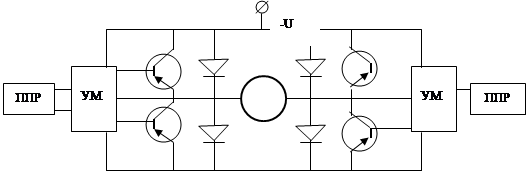
Один из возможных вариантов принципиальной схемы привода постоянного тока с широтно-импульсным управлением приведён на схеме.
 |





|






|
|



|
|
|












|











 В
В
В схеме мультивибратор (МВ) генерирует прямоугольные импульсы. Интегрирующая цепь (ИЦ) преобразует их в пилообразное напряжение. С учётом напряжения смещения Ucм это напряжение прикладывается к полупроводниковым реле (ППР). ППР через усилитель мощности управляет ключами Т1…Т4. Ключи выполняют переключения, описанные ранее. Поскольку у ключей индуктивная нагрузка, то в схеме предусмотрены диоды для замыкания обратных токов. Диоды во входной цепи позволяют весь сигнал усилителя напряжения (УН) прикладывать ко входу соответствующего ППР.
Уравнения движения исполнительного механизма с ДПТ.
При подаче управляющего сигнала на вход усилителя привода по обмотке управления ЭД протекают импульсы тока, которые можно заменить средними значениями.
В результате исполнительный механизм, состоящий из импульсного усилителя и ДПТ можно описать следующей системой уравнений:
 |
где UЯСР - среднее за период значение напряжения, приложенное к якорю двигателя (близко к величине UП), IЯСР - среднее значение тока якоря, RЯ -сопротивление якоря ЭД, СС -коэффициент противодействия ЭД, WДСР -среднее значение скорости якоря ЭД, LЯ-индуктивность обмотки якоря. Момент движущий на валу ЭД:
 |
где МДВСР -среднее значение момента ЭД, сМ -коэффициент момента ЭД.
Приведённое уравнение баланса моментов на валу ЭД записывается в виде:
 |
где МН -момент нагрузки привода, q -передаточное отношение редуктора, связывающего выходной вал ЭД с валом привода, IДВ -момент инерции якоря ЭД.
Момент нагрузки, действующий на валу привода, записывается в виде:
 |
где IH -момент инерции нагрузки, W -угловая скорость вращения выходного вала привода, kВТ -коэффициент вязкого трения в нагрузке, kШ -коэффициент шарнирного момента на выходном валу привода, d -угол отклонения выходнго вала привода.
|
|
|
|















|




|



|
|



|
|
|
|
|
 На основании приведённой системы уравнений структурная схема исполнительного механизма будет иметь вид: Приведённое описание исполнительного механизма с ДПТ справедливо при больших значениях несущей частоты импульсного усилителя ТН >> ТПР (несущая частота исчисляется килогерцами, а частота среза привода 10…60 1/с).
На основании приведённой системы уравнений структурная схема исполнительного механизма будет иметь вид: Приведённое описание исполнительного механизма с ДПТ справедливо при больших значениях несущей частоты импульсного усилителя ТН >> ТПР (несущая частота исчисляется килогерцами, а частота среза привода 10…60 1/с).
Передаточная функция и структурная схема
привода с ДПТ и импульсным
полупроводниковым усилителем мощности
В настоящее время для регулирования скорости ДПТ широко применяются усилители мощности, работающие в режиме переключения. Усилители этого типа имеют высокий к.п.д., они практически безынерционны и позволяют получать статические и динамические характеристики двигателя близкие к характеристикам при управлении от аналогового усилителя.
На основании принципиальной схемы привода и при описании импульсных процессов в обмотках двигателя будем пользоваться осреднёнными напряжениями и токами, что справедливо при частотах среза привода в диапазоне 2…10 Гц, при частотах модуляции, составляющие килогерцы.При описании системы уравнений в дальнейшем будем опускать индексы средних значений, что справедливо при принятом соотношении частот.
 |
Элемент сравнения сигналов:
где UBX - входной сигнал привода, UOC -напряжение обратной связи.
 |
Усилитель напряжения:
где ku – коэффициент усиления усилителя по напряжению.
 |
Скважность широтно-импульсного модулятора:
где kГ - коэффициент передачи по скважности.
Напряжение, приложенное к якорю двигателя:
 |
где UП - напряжение питания.
 |
Напряжение якоря на основании закона Ома связано стоком якоря соотношением:
 |
Cреднее значение момента на валу привода:
 |
Уравнение движения выходного вала привода:
 |
Уравнение нагрузки на выходном валу:
 |
Уравнение цепи обратной связи:
где kOC – коэффициент обратной связи.
Вид структурной схемы, составленной на основании приведённых уравнений, представлен на рисунке.

В структурную схему введено звено чистого запаздывания e-ts, связанное с запаздыванием в контуре из-за частотной модуляции широтно-импульсного сигнала.
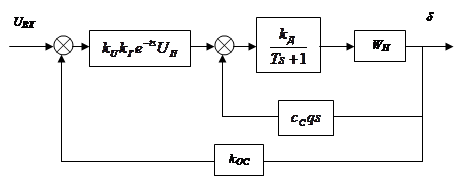 Структурную схему можно преобразовать, свернув внутренние контуры к виду стандартных звеньев где:
Структурную схему можно преобразовать, свернув внутренние контуры к виду стандартных звеньев где:

Структурная схема привода с ДПТ при отсутствии
шарнирной нагрузки на выходном валу.
При отсутствии нагрузки на выходном валу исполнительного механизма kШ =0 и kВТ =0
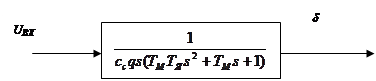 |
получим для исполнительной части привода на основании рассмотренной структуры, где
Для представления передаточной функции прямой цепи разомкнутого привода нужно добавить участок структурной схемы (уравнения), связывающие ошибку DU с напряжением якоря UЯ.
Привод, нагруженный только инерционной нагрузкой, описывается интегрирующим и колебательными звеньями. Нужно отметить особенность рассматриваемого привода, которая заключается в том, что за счёт использования высокооборотного и низкомоментного двигателя в нём применяется редуктор с большим передаточным отношением (q =100 и более). В этом случае необходимо в суммарном моменте инерции привода IS учитывать составляющую, определяемую моментом инерции ротора двигателя, приведённую к выходному валу привода IДВq2.
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 1393; Нарушение авторских прав?; Мы поможем в написании вашей работы!