КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Складання швидкостей
|
|
|
|
Визначимо швидкість абсолютного руху точки М, якщо відомі швидкості абсолютного і переносного рухів рухуцієї точки.
За малий проміжок часу  вздовж траєкторії
вздовж траєкторії  точка М зробить відносне переміщення, визначуване вектором
точка М зробить відносне переміщення, визначуване вектором  . Сама крива , рухаючись разом з рухливими осями, перейде за той же самий проміжок часу в нове положення
. Сама крива , рухаючись разом з рухливими осями, перейде за той же самий проміжок часу в нове положення  Одночасно та точка
Одночасно та точка  кривої , з якою співпала збігалися точка М, здійснить переносне переміщення
кривої , з якою співпала збігалися точка М, здійснить переносне переміщення  . В У результаті точка
. В У результаті точка  здійснить переміщення
здійснить переміщення  :.
:.
 .
.
Поділивши обидві частини рівності на і переходячи до границі, отримаємо
 .
.
Складання прискорень при поступальній переносній переносному ходірусі.
Визначимо прискорення абсолютного руху точки в окремому випадку поступальної поступального переносної переносного ходируху.
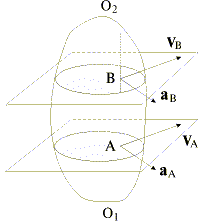
Справедлива теорема . Якщо рухлива рухома система відліку  рухається поступально відносно нерухомої
рухається поступально відносно нерухомої  , то всі точки тіла, що скріплене з цією системою, мають однакові швидкості і й прискорення, рівні що дорівнюють швидкості і й прискоренню початку координат рухливої рухомої системи О. Отже, для швидкості і прискорення переносного руху маємо:
, то всі точки тіла, що скріплене з цією системою, мають однакові швидкості і й прискорення, рівні що дорівнюють швидкості і й прискоренню початку координат рухливої рухомої системи О. Отже, для швидкості і прискорення переносного руху маємо:
 ,
,  .
.
Виразимо відносну швидкість в декартових координатах
 .
.
Підставляючи в теорему про складання швидкостей значення переносної і відносної швидкостей, отримуємо  .
.
За визначенням  ,
,
 ,
,  ,
,  .
.
Як наслідок,  .
.
Абсолютне прискорення точки при поступальній поступальному переносній переносному ході дорівнює векторній сумі прискорень переносного і відносного рухів:.
 .
.
Лекція 14
Короткий зміст: Плоский рух твердого тіла. Рівняння плоского руху. Розкладання плоского руху на поступальну поступальний і обертальну обертальний ходурух. Кутова швидкість і кутове прискорення при плоскому русі. Швидкості точок тіла при плоскому русі. Миттєвий центра швидкостей. Методи знаходження положення миттєвого центру швидкостей.
Плоский рух твердого тіла
Плоским рухом твердого тіла називається такий його рух, при якому кожна його точка весь час рухається в одній і тій же самій площині.
Площина, в якій рухаються окремі точки тіла, паралельна між собою і паралельні одній і тій же нерухомій площині. Плоский рух твердого тіла часто називають плоскопаралельним. Траєкторії точок тіла при плоскому русі є плоскими кривими.
Плоский рух твердого тіла має велике значення в техніці. Обертальний рух твердого тіла довкола навколо нерухомої осі є окремим випадком руху твердого тіла.
При вивченні плоского руху, як і будь-якого іншого, необхідно розглянути способи завдання цього руху, а також прийоми обчислення швидкостей і прискорень точок тіла.
| Рисунок 14.1 |
Перетин твердого тіла називатимемо плоскою фігурою. Положення фігури на її площині повністю визначається положенням відрізку відрізка прямої лінії, що жорстко скріплена з цією плоскою фігурою.
Рівняння плоского руху твердого тіла
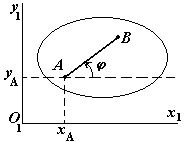
Для завдання положення плоскої фігури на площині відносно системи координат  , що лежить в площині фігури, досить задати на цій площині положення відрізку відрізка АВ, скріпленого з фігурою.
, що лежить в площині фігури, досить задати на цій площині положення відрізку відрізка АВ, скріпленого з фігурою.
Положення відрізку відрізка АВ, відносно системи координат визначається завданням координат якої-небудь точки цього відрізку відрізка і його напряму. Наприклад, координати точки А ( ) і напрямок, заданий кутом
) і напрямок, заданий кутом  .
.
| Рисунок 14.2 |
мають вид:  .
.
Тверде тіло при плоскому русі має три ступені свободи.
Функції
називаються рівняннями плоского руху твердого тіла.
| Рисунок 14.3 |
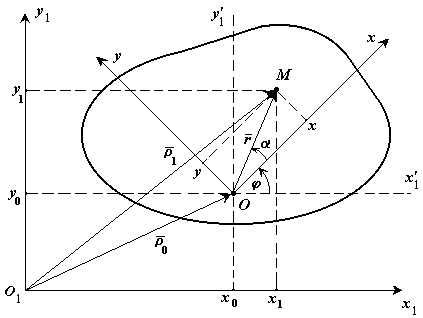
 , скріпленої Перейдемо до вивчення руху окремої точки твердого тіла. Положення будь-якої точки М плоскої фігури відносно рухливої рухомої системи відліку x і y точки М (Рисрис.6-3).
, скріпленої Перейдемо до вивчення руху окремої точки твердого тіла. Положення будь-якої точки М плоскої фігури відносно рухливої рухомої системи відліку x і y точки М (Рисрис.6-3).
Між координатами точки М в різних системах відліку існує зв’язок.
 , ,
| (6.1) |
де  –- довжина відрізка ОМ,
–- довжина відрізка ОМ,  - постійний кут між ОМ і віссю
- постійний кут між ОМ і віссю  . З врахуванням урахуванням виразів
. З врахуванням урахуванням виразів  і
і
 отримуємо
отримуємо
 . .
| (6.2) |
Формули (6-2) є рівняннями руху точки М плоскої фігури відносно координат . Ці формули дозволяють визначити координати будь-якої точки плоскої фігури по за заданих рівняннях руху цієї фігури і координатах координатами цієї точки відносно руххливомої системи відліку, що скріплена з рухомою фігурою.
Використовуючи матрично-векторні позначення, рівняння (6.2) можна записати в такій формі:
 ,,,, ,,,,
| (6.3) |
де А – матриця повороту на площині:
| Рисунок 14.4 |
 ,
,  ,
,  ,
,  .
.
Розкладання плоского руху на поступальну і обертальну ходу.
Теорема. Будь-який рух твердого тіла, у тому числі і рух плоскої фігури в її площині, безліччю способів можна розкласти на два рухи, один із яких переносний, а інший – відносний.
Зокрема, рух плоскої фігури в її площині відносно системи , розташованої в тій же самій плоскостіплощині, можна розкласти на переносний і відносний рухи таким чином. Приймемо Візьмемо за переносний рух фігури її рух разом з поступально рухомою системою координат  , початок якої скріплений з точкою О фігури, прийнятою взятою за полюс. Тоді відносний рух фігури буде по відношеннювідносно до рухливої рухомої системи координат обертанням довкола навколо рухливої рухомої осі, перпендикулярній перпендикулярної до плоскій плоскої фігурі фігури і таким, що проходить через вибраний полюс.
, початок якої скріплений з точкою О фігури, прийнятою взятою за полюс. Тоді відносний рух фігури буде по відношеннювідносно до рухливої рухомої системи координат обертанням довкола навколо рухливої рухомої осі, перпендикулярній перпендикулярної до плоскій плоскої фігурі фігури і таким, що проходить через вибраний полюс.
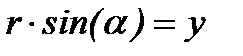
Для доведення цього досить показати, що плоску фігуру в її площині з одного положення в будь-яке інше можна перевести двома переміщеннями – поступальним переміщенням ву площині фігури разом із якимось полюсом і поворотом в тій же самій площині довкола навколо цього полюса.
Розглянемо два будь-яких положення плоскої фігури 1 і 2. Виділимо відрізок АВ в даній фігурі. Переведення фігури з положення 1 в положення 2 можна розглядати як суперпозицію двох рухів: поступального з 1 в 1'' і обертального з 1' в 2 навколо точки A', що зазвичай називається полюсом (рис. 6-4а). Істотно, що як полюс можна вибрати будь-яку точку, що належить фігурі або навіть таку що лежить в площині поза фігурою. На рис. 6-4б, наприклад, як полюс вибрана точка В. Зверніть увагу: довжина шляху при поступальному переміщенні змінилася (в даному випадку збільшилася), але кут повороту залишився тим самим!
Кутова швидкість і кутове прискорення тіла
при плоскому русі.
Для характеристики обертальної частини плоского руху твердого тіла довкола навколо рухливої рухлииої осі, що проходить через вибраний полюс, вводиться поняття кутової швидкості  і кутового прискорення
і кутового прискорення  .
.
 і
і  , де
, де  – одиничний вектор, спрямований по осі обертання.
– одиничний вектор, спрямований по осі обертання.
Якщо кут повороту довкола навколо рухливої рухомої осі, що проходить через полюс, позначити , то  , а
, а  .
.
Вектори і можна зобразити в будь-яких точках рухливої рухомої осі обертання, тобто вони є вільними векторами.
Швидкості точок тіла при плоскому русі
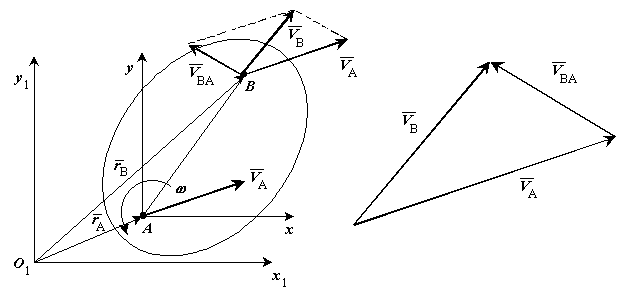
Теорема. Швидкість якої-небудь точки фігури при
| Рисунок 14.5 |
її плоскому русі дорівнює векторній сумі швидкості полюса і відносної швидкості цієї точки від обертання фігури довкола навколо полюса.
Застосовуючи до плоского руху теорему про складання швидкостей для якої-небудь точки В фігури, отримуємо  , де
, де  абсолютна швидкість точки В плоскої фігури;
абсолютна швидкість точки В плоскої фігури;  – швидкість точки В переносного поступального руху плоскої фігури разом, наприклад, із точкою А цієї фігури;
– швидкість точки В переносного поступального руху плоскої фігури разом, наприклад, із точкою А цієї фігури;  – швидкість точки B у відносному русі, яким є обертання плоскої фігури навколо точки А з кутовою швидкістю ω.
– швидкість точки B у відносному русі, яким є обертання плоскої фігури навколо точки А з кутовою швидкістю ω.
Оскільки за переносний рух вибрана поступальна хода разом із точкою А, то у всіх точок плоскої фігури однакові переносні швидкості, співпадаючі що збігаються з абсолютною швидкістю точки А, тобто  .
.
Швидкість відносного руху, у разі, коли воно він є обертальним рухом, рівнадорівнює 
Швидкість  розташована в плоскості площині рухомої фігури і направлена напрямлена перпендикулярно до відрізку відрізка АВ, що сполучає з’єднує точку В з полюсом А. Цю відносну швидкість можна виразити у вигляді векторного добутку
розташована в плоскості площині рухомої фігури і направлена напрямлена перпендикулярно до відрізку відрізка АВ, що сполучає з’єднує точку В з полюсом А. Цю відносну швидкість можна виразити у вигляді векторного добутку  , де кутова швидкість
, де кутова швидкість  вважається направленою напрямленою по рухливій рухомій осі обертання, що проходить через точку А і перпендикулярній плоскості фігури. Відносну швидкість позначимо
вважається направленою напрямленою по рухливій рухомій осі обертання, що проходить через точку А і перпендикулярній плоскості фігури. Відносну швидкість позначимо  . Це позначення показує, що швидкість відносного руху точки В отримується від обертання плоскої фігури довкола навколо рухливої рухомої осі, що проходить через точку А, або просто довкола навколо точки А:.
. Це позначення показує, що швидкість відносного руху точки В отримується від обертання плоскої фігури довкола навколо рухливої рухомої осі, що проходить через точку А, або просто довкола навколо точки А:.
 , де
, де  ,
,
щЩо і й потрібно було довести.
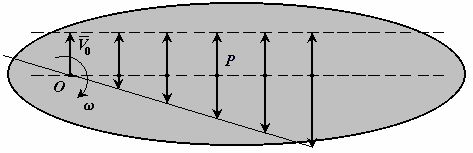
Миттєвий центр швидкостей
Миттєвим центром швидкостей називається точка плоскої фігури, швидкість якої в даний момент часу дорівнює нулю.
| Рисунок 14.6 |
Теорема. У кожен момент часу при плоскому русі фігури в її плоскості площини при
 (непоступальний рух), є один єдиний центр швидкостешвидкості.
(непоступальний рух), є один єдиний центр швидкостешвидкості.
Для доведення досить вказати зазначити спосіб знаходження миттєвого центру центра швидкостей, якщо відомі швидкість якої-небудь точки О плоскої фігури і її кутова швидкість в даний момент часу:.
 ,
,  ,, як наслідок
,, як наслідок
 .
.
Миттєвий центр швидкостей - знаходиться на перпендикулярі до швидкості  , проведеному з точки О, на відстані
, проведеному з точки О, на відстані  .
.
Миттєвий центр швидкостей це єдина точка плоскої фігури для даного моменту часу. У інший момент часу миттєвим центром швидкостей буде вже інша точка.
Візьмемо точку Р за полюс 
Так якОскільки  , то
, то  . Аналогічний результат виходить для будь-якої іншої точки плоскої фігури:.
. Аналогічний результат виходить для будь-якої іншої точки плоскої фігури:.
 ,.
,.

 .
.
Швидкості точок плоскої фігури визначаються в даний момент так, якби рух фігури був обертанням довкола навколо миттєвого центру центра швидкостей.
Швидкості точок плоскої фігури пропорційні їх відстаням до миттєвого центру центра швидкостей.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1014; Нарушение авторских прав?; Мы поможем в написании вашей работы!