КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
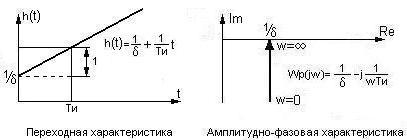
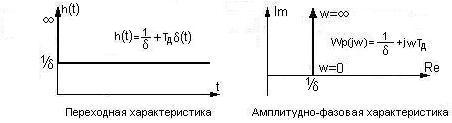
Динамические характеристики И-регулятора
|
|
|
|
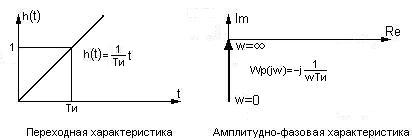
В системе регулирования с И-регулятором обычно отсутствует статическая ошибка регулирования. Как правило И-регулятор используется не самостоятельно, а в составе ПИ- или ПИД- регуляторов.
Свойства:
На НЧ коэф. усил. >>1, а на ВЧ <<1. То есть включение такого регулятора даёт резкое увеличение коэф. Усиления в статическом режиме. Установившаяся ошибка- равна нулю
Регулятор вносит запаздывание в систему на 90 градусов то есть ухудшается быстродействие системы
ПИ – регулятор(пропорционально-интегральный)
| lg(w) |

|
|
|

| lg(w) |

|

|

|

|
Свойства:
На НЧ коэф. Усил. >>1. Установившаяся ошибка- стремиться к нулю
Фазовый сдвиг с ростом частоты уменьшается до нуля
При выборе параметров необходимо, чтобы на частоте среза регулятор вносил минимальные искажения.
Выходной сигнал содержит пропорциональную и интегральную составляющую, скорость нарастания определяется Т2
Динамические характеристики ПИ-регулятора
В системе регулирования с ПИ-регулятором так же, как и в системе с И-регулятором, отсутствует статическая ошибка, но динамические характеристики лучше.
Пропорционально-дифференциальный регулятор (ПД-регулятор)

ПД-регулятор - это параллельно соединенные пропорциональное и идеальное дифференцирующее звенья. Выходной сигнал ПД-регулятора (u(t)) зависит от ошибки регулирования (e(t)) и от производной от этой ошибки (от скорости изменения ошибки).
L(w)=20lg  +20lgК
+20lgК

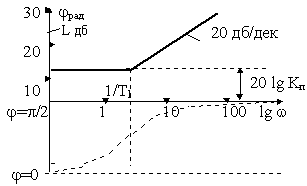
Свойства:
На НЧ коэф. усиления постоянный. На ВЧ он растёт-> усиливаются ВЧ помехи.
Регулятор вносит опережение в систему на 90 градусов то есть улучшается быстродействие системы
Передаточная функция ПД-регулятора: Wр(S)=K1+K2*p
Переходная характеристика: h(t)=K1+K2*d(t), где d(t) - дельта-функция
Динамические характеристики ПД-регулятора
В системе регулирования с ПД-регулятором дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки.
Если de/dt>0 (скорость изменения ошибки положительна) => ошибка растет и дифференцирующая часть, суммируясь с пропорциональной, увеличивает воздействие регулятора на объект. Если de/dt<0 (скорость изменения ошибки отрицательна) => ошибка уменьшается и дифференцирующая часть, суммируясь с пропорциональной, уменьшает воздействие регулятора на объект.
В системе регулирования с ПД-регулятором обычно так же, как и в системе с П-регулятором существует статическая ошибка регулирования (если объект статический), но быстродействие у такой системы выше, чем у систем с П-, И- и ПИ- регуляторами.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1964; Нарушение авторских прав?; Мы поможем в написании вашей работы!