КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пид-регулятор
|
|
|
|
Пропорциональные регуляторы с введением в закон регуляции интеграла и производной от регулируемого размера (ПИД-РЕГУЛЯТОРИ) являют собой комбинацию пропорционального, интегрирующего и дифференцирующего регуляторов.
Наиболее распространена схема ПИД-РЕГУЛЯТОРА изображенная на рисунку 3.1. Его передаточная функция:
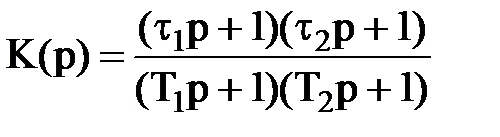 , (3.1)
, (3.1)
где t1=С1R1, t2=C2R2,
а Т1, Т2 с системи:
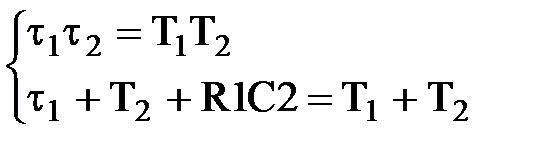 (3.2)
(3.2)
Рисунок 3.1 – ПИД-регулятор
ЛАЧХ L(w) і ЛФЧХ y(w) ПИД-регулятора изображены на рисунках 3.2 і 3.3

Рисунок 3.2 – ЛАХ ПИД-регулятора

Рисунок 3.3 – ЛЧХ ПИД-регулятора
Частоты сопряжения: w1=1/Т1, w2=1/t1, w3=1/t2, w4=1/Т2.
ПИД-РЕГУЛЯТОР также можно представить как систему из трех параллельно включенных звеньев: пропорциональной, интегрирующей и идеальной дифференцирующей. (рисунок 3.4).
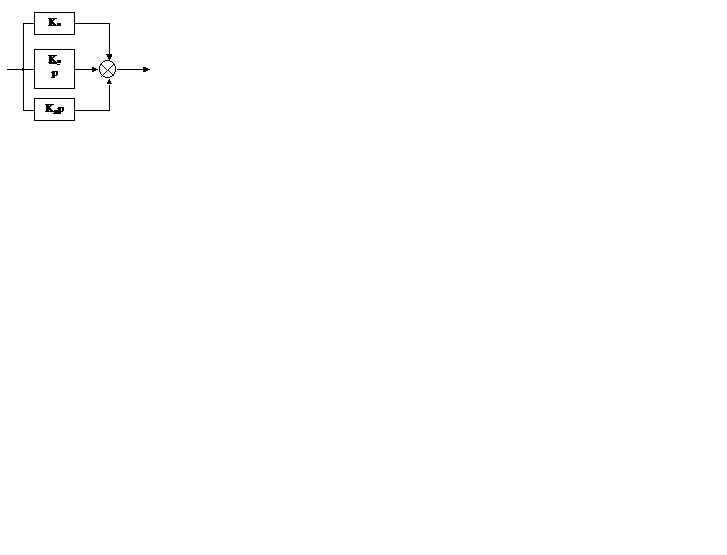
Рисунок – Структурная схема ПИД-регулятора
Как видно из ЛАЧХ ПИД-РЕГУЛЯТОР ведет себя в области высоких частот как контур, который дифференцирует. Дифференциальный канал позволяет увеличить частоту среза системы, а значит уменьшить время переходного процесса.
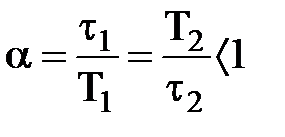
Коэффициент усиления пропорционального канала отвечает за область средних частот. При этом увеличивая Кп можно уменьшить время переходного процесса. В области средних частот регулятор вносить ослабление, которое составляет в децибелах 20lga, где
Интегрирующий контур определяет поведение системы в области низких частот. Регулятор позволяет значительно повысить усиление системы в области низких частот, не увеличивая частоты среза системы. Благодаря этому удается существенно уменьшить постоянную ошибку системы.
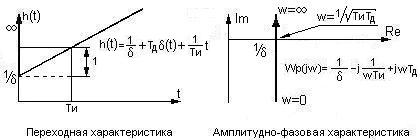
Динамические характеристики ПИД-регулятора
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 566; Нарушение авторских прав?; Мы поможем в написании вашей работы!