КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Примеры вычисления работы
|
|
|
|
Рассмотренные ниже примеры дают результаты, которыми можно непосредственно пользоваться при решении задач.
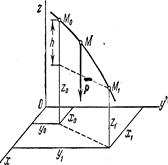
 1) Работа силы тяжести. Пусть точка М, на которую действует сила тяжести Р, перемещается из положения М0 (x0, у0, z0 ) в положение M1 (х1, у1, z1). Выберем оси координат так, чтобы ось Oz была направлена вертикально вверх (рис.8). Тогда
1) Работа силы тяжести. Пусть точка М, на которую действует сила тяжести Р, перемещается из положения М0 (x0, у0, z0 ) в положение M1 (х1, у1, z1). Выберем оси координат так, чтобы ось Oz была направлена вертикально вверх (рис.8). Тогда
 Рx=0, Рy=0, Pz=-Р. Подставляя эти значения и
Рx=0, Рy=0, Pz=-Р. Подставляя эти значения и
учитывая переменную интегрирования z:
|
|
|
|
Если точка M0 выше М1, то z0 - z1= h, где
h -величина вертикального перемещения точки;
если же точка M0 ниже точки M1то
Рисунок 8 z0-z1=-(z1-z0)=-h.
Окончательно получаем:
А(М0М1)=±Рh.
Следовательно, работа силы тяжести равна взятому со знаком плюс или минус произведению модуля силы на вертикальное перемещение точки ее приложения. Работа положительна, если начальная точка выше конечной, и отрицательна, если начальная точка ниже конечной.
Из полученного результата следует, что работа силы тяжести не зависит от вида той траектории, по которой перемещается точка ее приложения.
Силы, обладающие таким свойством, называются
потенциальными.
 2) Работа силы упругости. Рассмотрим груз М,
2) Работа силы упругости. Рассмотрим груз М,
лежащий на горизонтальной плоскости и
прикрепленный к свободному концу некоторой
пружины (рис. 9,а). Отметим на плоскости
точкой О положение, занимаемое концом пружины, когда она не напряжена (АO=l0-длина
|
 равновесного положения О, удлинив пружину до величины l, то на груз будет действовать сила упругости пружины F, направленная к точке О. По закону Гука величина этой силы пропорциональна удлинению пружины Δl=l-l1. Так как в нашем случае Δl=x, то по модулю
равновесного положения О, удлинив пружину до величины l, то на груз будет действовать сила упругости пружины F, направленная к точке О. По закону Гука величина этой силы пропорциональна удлинению пружины Δl=l-l1. Так как в нашем случае Δl=x, то по модулю 
Коэффициент с называется коэффициентом жесткости пружины. В технике обычно измеряют величину с в H/см, полагая коэффициент с численно равным силе, которую надо приложить к пружине, чтобы растянуть ее на 1 см.
Найдем работу, совершаемую силой упругости при перемещении груза из положения М0(x0) в положение М1(x1). Так как в данном случае Fх= -F =-cx, Fy = Fz = 0, то получим:
|
|
|
|

(Этот же результат можно получить по графику зависимости F от х (рис.9, б), вычисляя площадь σ заштрихованной на чертеже трапеции и учитывая знак работы.) В полученной формуле x0 представляет собою начальное удлинение пружины Δlнач, а X1- конечное удлинение пружины Δlкон. Следовательно,
А(М0М1)= 
т. е. работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины.
Работа будет положительной, когда | Δlнач| > |Δlкон|, т. е. когда конец пружины перемещается к равновесному положению, и отрицательной, когда | Δlнач| < |Δlкон|, т.е. конец пружины удаляется
 от равновесия положения. Можно доказать, что
от равновесия положения. Можно доказать, что
формула остается справедливой и в случае, когда
 перемещение точки М не является прямолинейным.
перемещение точки М не является прямолинейным.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 392; Нарушение авторских прав?; Мы поможем в написании вашей работы!
