КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Интерпретация концептуальной модели в математическое описание конечного автомата
|
|
|
|
Итак, в данном случае имеются четыре варианта входных комбинаций (входов) автомата A. a = (0, 0), b = (1, 0), с = (1, 1), d = (0, 1), где пара (i, j) означает, что к контакту X  приложено напряжение i, а к контакту X
приложено напряжение i, а к контакту X  — напряжение j (рис. 8).
— напряжение j (рис. 8).
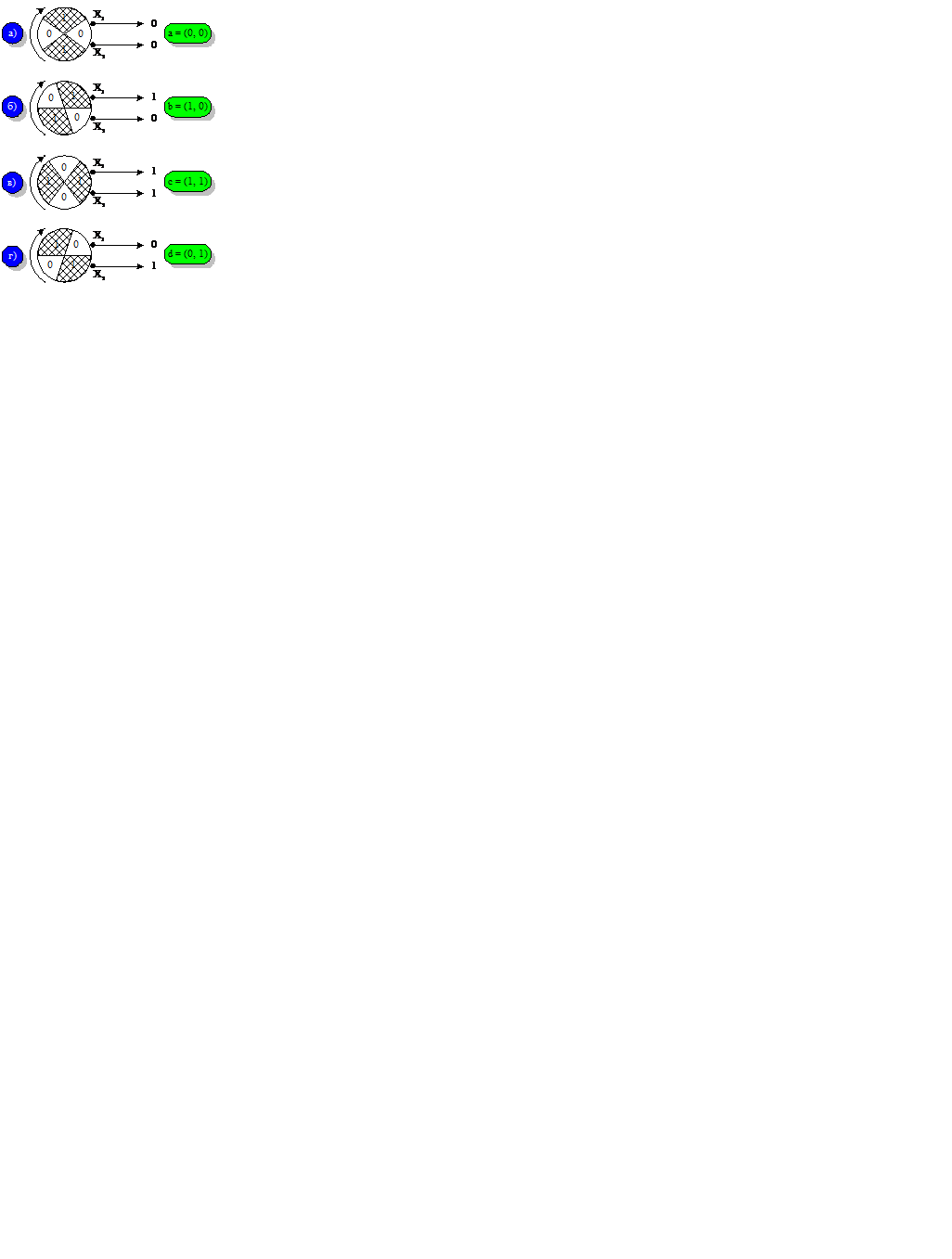
Рис. 8. Входные комбинации автомата
Поскольку очевидно, что по отдельному входу автомата направление вращения определено быть не может, то ясно, что автомат должен в некотором смысле суммировать входы в предшествующие моменты времени и запоминать каким-либо способом состояние системы в данный момент для использования этой информации в дальнейшем. В качестве состояний системы будем рассматривать восемь пар, первая компонента которых — последний по времени вход, а вторая — выход (0 или 1):
Z  = (a, 1), Z = (b, 1), Z
= (a, 1), Z = (b, 1), Z  = (c, 1),
= (c, 1),
Z  = (d, 1), Z
= (d, 1), Z  = (d, 0), Z
= (d, 0), Z  = (c, 0),
= (c, 0),
Z  = (b, 0), Z
= (b, 0), Z  = (a, 0).
= (a, 0).
По состоянию и (новому) входу (например, по Z и a, или по Z и b, или Z и d и так далее) непосредственно может быть определено направление вращения (выход при Z и а равен 1, при Z и b равен 1, при Z и d равен 0 и так далее).
Некоторые комбинации состояний и входов недопустимы: Z или Z  и с, Z
и с, Z  или Z
или Z  и d, Z
и d, Z  или Z
или Z  и a, Z
и a, Z  или Z
или Z  и b. В таких случаях следует предполагать, что произошла ошибка, а автомат должен порождать выход (1), сигнализирующий об этом. Мы будем считать, что ошибочный вход прекращается в тот момент, когда в автомат A поступает сигнал, отличный от ошибочного.
и b. В таких случаях следует предполагать, что произошла ошибка, а автомат должен порождать выход (1), сигнализирующий об этом. Мы будем считать, что ошибочный вход прекращается в тот момент, когда в автомат A поступает сигнал, отличный от ошибочного.
Итак, автомат A имеет два рода выходов (выходных информаций): один — для указания направления вращения вала и второй — для сигнализации об ошибках (0 в случае, если ошибки не было). Итак, А имеет четыре выходных комбинации (четыре выхода): p = (0, 0), q = (1, 0), r = (1, 1), s = (0, 1), где первая компонента каждой пары определяет направление вращения.
Теперь можно описать способ функционирования автомата A таблицей, в которой новое состояние и соответствующий выход ставятся в соответствие старому состоянию и полученному входу (при этом вместо Z мы пишем просто 1).
Отметим, что мы не делали никаких предположений о том, в каком именно состоянии находится автомат в начале своей работы, так что первые его выходы могут оказаться неверными — так же, как и при наличии ошибки во входе. Однако не позже того, как ось совершит один оборот, выход станет верным (конечно, если не будет ошибок во входе).
| Вход Состояние | a | b | c | d |
| 1/q | 2/q | 1/r | 5/p | |
| 8/p | 2/q | 3/q | 2/r | |
| 3/r | 7/p | 3/q | 4/q | |
| 1/q | 4/r | 6/p | 4/q | |
| 1/q | 5/s | 6/p | 5/p | |
| 6/s | 7/p | 6/p | 4/q | |
| 8/p | 7/p | 3/q | 7/s | |
| 8/p | 2/q | 8/s | 5/p |
Таблица автомата A
Автомат A может быть очень удобно описан графом, изображенным на рис. 9.
Направления стрелок от 1 к 2 и соответственно от 5 к 6 и т.д. соответствуют направлению вращения шайбы.
Рассмотренный датчик может быть описан также как автомат с множеством входов Х={а, b, c, d}, множеством выходов Y={p, q, r, s} и множеством состояний Z={ Z , Z , Z , Z , Z , Z , Z , Z }. Функционирование этого автомата (зависимость изменения состояний и выходов от входов в данных состояниях) будет при этом задаваться вышеприведенной таблицей, т.е. двумя функциями f: Z  X
X  Z и g: Z X Y.
Z и g: Z X Y.
|
|
|
|
|
Дата добавления: 2014-11-28; Просмотров: 438; Нарушение авторских прав?; Мы поможем в написании вашей работы!