При изучении движения механизма все звенья и кинематические пары изображают на схемах упрощенно. Условные изображения наиболее часто используемых кинематических пар 5-го и 4-го классов показаны: на рис. 1.3, а, б – вращательные пары с подвижными 1, 2 и неподвижным 0 звеньями; на рис. 1.3, в, г – поступательная; на рис. 1.3, д – винтовая; на рис. 1.3, е – пара 4-го класса в месте зацепления А зубчатых колес 1 и 2.
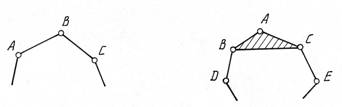
Звенья соединяются при помощи кинематических пар в кинематические цепи. В зависимости от характера движения звеньев различают плоские и пространственные кинематические цепи. Плоские цепи образуются звеньями, совершающими плоское движение; точки звеньев пространственных цепей описывают пространственные траектории.
Кинематические цепи делятся на простые и сложные. В простой цепи каждое звено входит не более чем в две кинематические пары (рис. 1.4, а). Различают замкнутые и незамкнутые, открытые кинематические цепи. В открытой кинематической цепи есть звенья, входящие только в одну кинематическую пару (рис. 1.4, б); в замкнутой кинематической цепи все звенья входят не менее чем в две кинематические пары.
Механизм можно представить в виде кинематической цепи, имеющей обязательно одно неподвижное звено-стойку. Но не любая кинематическая цепь может быть механизмом. Известно, что важнейшим свойством любого механизма является его подвижность, которая оценивается степенью подвижности (свободы) механизма. Она равна числу независимых движений, которые нужно задать ведущему (ведущим) звену механизма, чтобы получить вполне определенное движение всех остальных подвижных звеньев. Степень подвижности механизма W должна быть не менее единицы и равна числу обобщенных координат механизма, т.е. числу независимых кинематических параметров (перемещений). В плоских механизмах ведущие звенья совершают обычно одно простое движение – вращательное или поступательное, поэтому для таких механизмов степень подвижности равна числу ведущих звеньев. Может быть одно или несколько ведущих звеньев. Если ведущее звено совершает вращение вокруг неподвижной оси, его положение определяется обобщенной координатой – углом поворота звена. Если же ведущее звено совершает поступательное движение, его положение определяется координатой линейного перемещения звена.
Рис. 1.4
а
б
Степень подвижности механизма можно определить из его структурной формулы, связывающей подвижность с числом звеньев, числом и классом кинематических пар. Пусть механизм состоит из k звеньев. Так как одно из звеньев (стойка) является неподвижным, количество подвижных звеньев механизма n = k – 1.
Рассмотрим пространственный механизм. Если бы звенья механизма не были связаны кинематическими парами, то общее количество простейших движений всех подвижных звеньев механизма равнялось бы 6n. Пусть в механизм входит: число пар 1-го класса Р1; число пар 2-го класса – Р2; число пар 3-го класса – Р3; число пар 4-го класса – Р4; и 5-го класса – Р5. Каждая кинематическая пара 1-го класса ограничивает одно простейшее движение, а все пары 1-го класса делают невозможными 1Р1 движений. Каждая пара 2-го класса ограничивает два простейших движения, а все пары 2-го класса – 2Р2 движений. Аналогично рассуждая, видим, что кинематические пары 3-го, 4-го и 5-го классов исключают соответственно 3Р3, 4Р4 и 5Р5 простейших движений подвижных звеньев механизма. Число независимых возможных движений пространственного механизма, состоящего из n подвижных звеньев, будет равно
W = 6n – 1Р1 – 2Р2 – 3Р3 – 4Р4 – 5Р5. (1.1)
Определим степень подвижности плоских механизмов, как наиболее распространенных. В плоском движении подвижные звенья, не связанные кинематическими парами, имели бы 3n степеней свободы (подвижности). Каждая кинематическая пара 5-го класса отнимает у звена два простейших движения, а каждая кинематическая пара 4-го класса – одно простейшее движение. Следовательно, кинематические пары 5-го класса отнимают у плоской кинематической цепи 2Р5, а 4-го класса – 1Р4 степеней свободы. Степень подвижности плоского механизма в этом случае будет определяться по формуле
W = 3n – 2Р5 – Р4. (1.2)
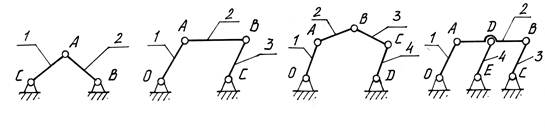
Зависимости (1.1) и (1.2) по имени их авторов, называют соответственно формулами А.П. Малышева и П.Л. Чебышева. Они помогают оценить, можно ли использовать ту или иную кинематическую цепь в качестве структурной схемы механизма, а также число ведущих звеньев механизма. Так, для схем, рассмотренных на рис. 1.5, а, б, в, степень подвижности равна соответственно 0; 1 и 2. Кинематическая цепь, представленная на рис. 1.5, а не может использоваться в виде схемы для преобразования движения, а число ведущих звеньев механизмов, приведенных на рис. 1.5, б, в должно быть соответственно равно 1 и 2.
г
а
в
Рис. 1.5
б
Преимущественное распространение получили механизмы с одной или двумя степенями подвижности. Встречаются механизмы, число степеней подвижности которых не соответствует условию (1.2). В общее число наложенных ограничений может войти некоторое число повторных (лишних) связей, введенных в механизм по различным причинам. В механизме шарнирного параллелограмма (рис. 1.5, б), имеющего W = 1, для увеличения жесткости к звену 2 и стойке присоединили дополнительно звено 4. Звено 4 и кинематические пары D и Е в действительности не изменили кинематики механизма, но сделали по формуле (1.2) степень подвижности W = 0. Связи, не влияющие на кинематику механизма, а формально уменьшающие его степень подвижности, называют пассивными. В некоторых механизмах есть звенья, относительные движения которых не влияют на кинематику механизма. Такие механизмы имеют «лишние» степени свободы. Вращение круглого ролика 3 кулачкового механизма на рис. 1.11, г не влияет на движения ни кулачка 1, ни звена 2, но формально создает лишнюю степень свободы (W = 2).
studopedia.su - Студопедия (2013 - 2025) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление