КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод кинематических диаграмм
|
|
|
|
Определение перемещений (S, φ), скоростей (v, ω) и ускорений (a, ε) рассмотренными выше методами ведется для ряда положений механизма, близко отстоящих друг от друга. Обычно период движения ведущего звена механизма разбивают на 12 положений и для каждого из них строят план механизма. По полученным значениям этих величин могут быть построены графики, носящие название кинематических диаграмм. Каждая кинематическая диаграмма обычно представляет собой графическое изображение изменения одного из кинематических параметров звеньев или точек звеньев исследуемого механизма в функции времени или перемещения ведущего звена. Например, для кривошипно-ползунного механизма (см. рис. 1.7) можно построить кинематические диаграммы перемещений Sc, скоростей vc и ускорений a c точки С ползуна в зависимости от угла поворота φ кривошипа: Sc = Sc(φ); vc = vc(φ); a c = a c(φ) или времени t: Sc = Sc(t) и т.д.
Наиболее просто строить кинематические диаграммы перемещений звеньев (точек) механизма. Для их построения достаточно наличие только планов положений звеньев механизма. Пусть на рис. 2.5, а задана кинематическая диаграмма пути S = S(φ); S = S(t). Определение скоростей и ускорений основано на методе графического дифференцирования.
Графическое дифференцирование. Для построения диаграммы скоростей воспользуемся зависимостью
v =  . (2.13)
. (2.13)
Скорость точки в рассматриваемый момент времени пропорциональна тангенсу угла наклона касательной в соответствующих точках кривой диаграммы перемещений. Формула (2.13) является основой графического дифференцирования: определение истинных скоростей сводится к проведению касательных к кривой S = S(t) и определению тангенсов углов наклона их к оси абсцисс. Вместо касательных проще проводить хорды, что приводит к более простому, но менее точному методу – методу хорд, когда кривую S = S(t) заменяют вписанной в нее ломаной линией. Сущность метода хорд заключается в следующем. Делим отрезок оси абсцисс 0–5 (см. рис. 2.5, а) на равное число частей 0–1; 1–2 и т.д. и в точках 1, 2, 3, 4, 5 проводим ординаты до пересечения с кривой S = S(t) в точках 1', 2', …, 5'. Соединив эти точки прямыми, получаем ломаную линию 0'–1'–2'–…–5'. Для построения диаграммы скорости выбираем начало новой системы координат – точку О1 (рис. 2.5, б). На оси абсцисс откладываем влево от точки О1 произвольный отрезок О1P1 = H1, называемый полюсным расстоянием. Затем через точку Р1 проводим лучи Р111; Р121 и т.д., параллельные хордам 0–1¢; 1¢–2¢; …; 4¢–5¢, отсекающие на оси ординат отрезки, пропорциональные средним скоростям на участках 0–1;
1–2; …; 4–5 и удовлетворяющие соотношениям:
О111 = H1tgα1 = H1  ,
,
где  – масштабная средняя скорость на отрезке времени Dt1 (см. рис. 2.5, а).
– масштабная средняя скорость на отрезке времени Dt1 (см. рис. 2.5, а).
Отрезок О111 изображает среднюю скорость в масштабе μv =  , т.е.
, т.е.  = |О111|×μv.Для получения кривой vcp = vcp(t) необходимо полученные ординаты О111; О121; …; О151 масштабных значений средних скоростей перенести на середины соответствующих отрезков (Δt / 2) оси абсцисс и вершины ординат, т.е. точки 11', 21', …, 51' соединить плавной кривой. Истинное значение средней скорости в каждый момент определяется по формуле
= |О111|×μv.Для получения кривой vcp = vcp(t) необходимо полученные ординаты О111; О121; …; О151 масштабных значений средних скоростей перенести на середины соответствующих отрезков (Δt / 2) оси абсцисс и вершины ординат, т.е. точки 11', 21', …, 51' соединить плавной кривой. Истинное значение средней скорости в каждый момент определяется по формуле
v = μv×  . (2.14)
. (2.14)
Дифференцируя графическим путем кривую v = v (t), можно получить кинематическую диаграмму ускорений a = a (t). Методика построения кривой a = a (t) ничем не отличается от построения v = v (t). Чем меньше участки, на которые разбиваем исследуемую кривую вдоль оси абсцисс, тем точнее метод дифференцирования.
Рассмотренный метод широко применяется для кинематического исследования механизмов. Анализ кинематических диаграмм v = v (t) и a = a (t) (особенно последний) позволяет судить о величине динамических нагрузок, возникающих в механизме, а следовательно, надежности механизма. Избежать ударов в механизмах можно лишь тогда, когда ускорение звеньев на кинематической диаграмме a = a (t) изменяется плавно. Поэтому часто задаются (например, для кулачковых механизмов) графиком ускорений толкателя, а искомый график его перемещений находят методом графического интегрирования. Так поступают и в том случае, если нас не интересует закон движения толкателя, а устанавливается только его максимальный ход (h). Например, такие требования предъявляются к кулачковым механизмам, применяемым в различных реле, в командных устройствах.
Графическое интегрирование. Пусть задана диаграмма v = v (t) (рис. 2.6, а). Тогда путь исследуемой точки за некоторый промежуток времени определится как S = μv μt  . Отсюда видно, то задача построения интегральной кривой S = S(t) по заданной v = v (t) сводится к определению и суммированию площадей ряда вертикальных полос. Эту задачу можно выполнить графически следующим образом. Разделим кривую v = v (t) точками a, b, c, d, e на участки, соответствующие моментам времени 0–1; …; 4–5. Величины отрезков, определяющих средние скорости на каждом участке точками 10, 20 и т.д. снесем на ось ординат в точки 11, 21, …, 51. Эти точки лучами соединим с полюсом Р, выбранном на оси абсцисс на расстоянии Н от точки О. Затем, выбрав начало (точку О1) новой системы координат (рис. 2.6, б), в пределах соответствующих делений 01–1; 1–2; …; 4–5 по оси абсцисс последовательно проводим линии 01 а 1; a 1b1; b1c1; … параллельные лучам Р11; Р21 и т.д. Через полученные точки (a 1; b1; c1; …) проведем плавную кривую, являющуюся диаграммой пути S = S(t). Масштаб диаграммы пути равен μs = μvμtH(м/мм).
. Отсюда видно, то задача построения интегральной кривой S = S(t) по заданной v = v (t) сводится к определению и суммированию площадей ряда вертикальных полос. Эту задачу можно выполнить графически следующим образом. Разделим кривую v = v (t) точками a, b, c, d, e на участки, соответствующие моментам времени 0–1; …; 4–5. Величины отрезков, определяющих средние скорости на каждом участке точками 10, 20 и т.д. снесем на ось ординат в точки 11, 21, …, 51. Эти точки лучами соединим с полюсом Р, выбранном на оси абсцисс на расстоянии Н от точки О. Затем, выбрав начало (точку О1) новой системы координат (рис. 2.6, б), в пределах соответствующих делений 01–1; 1–2; …; 4–5 по оси абсцисс последовательно проводим линии 01 а 1; a 1b1; b1c1; … параллельные лучам Р11; Р21 и т.д. Через полученные точки (a 1; b1; c1; …) проведем плавную кривую, являющуюся диаграммой пути S = S(t). Масштаб диаграммы пути равен μs = μvμtH(м/мм).
Рассмотренный выше метод графического интегрирования широко применяется при синтезе кулачковых механизмов. Под синтезом понимают определение формы и размеров кулачка, удовлетворяющих тем движениям, которые должен осуществлять толкатель.
|
|
|
|
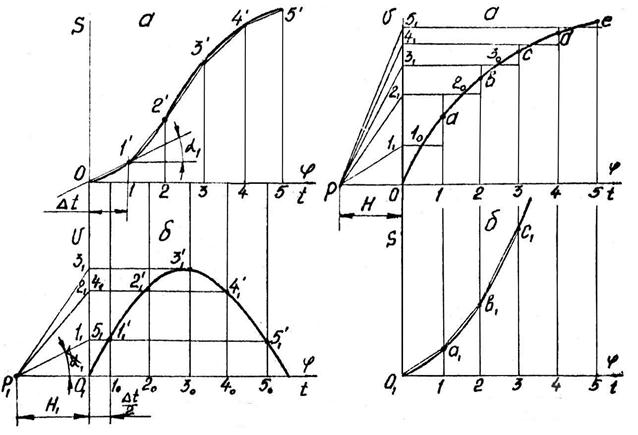
Рис. 2.5 Рис. 2.6
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1457; Нарушение авторских прав?; Мы поможем в написании вашей работы!