КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
О соотношении скоростей в высшей кинематической паре
|
|
|
|
В месте контакта ведомые и ведущие звенья кулачковых, фрикционных, зубчатых передач образуют высшую кинематическую пару. В этой паре (рис. 2.7) должны выполняться следующие условия:
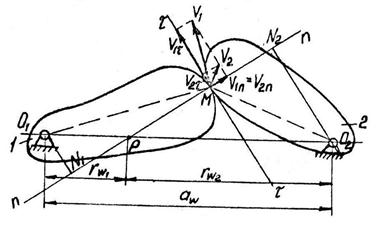
Рис. 2.7
Геометрическое условие. В точке контакта профилей поверхности имеют общую нормаль. Если нормали к поверхностям в точке контакта не будут составлять одну прямую, то профили пересекутся.
Кинематическое условие. Проекции на общую нормаль скоростей контактирующих точек, принадлежащих звеньям 1, 2, одинаковы, т. е. v1n = v2n, при невыполнении этого условия контактирующие поверхности разойдутся или внедрятся друг в друга.
Рассмотрим передачу, состоящую из двух звеньев 1 и 2, вращающихся вокруг неподвижных параллельных осей (см. рис. 2.7) с межосевым расстоянием а w. Точка Р пересечения общей нормали n – n к соприкасающимся поверхностям, которая проведена в точке контакта звеньев с линией, соединяющей их центры вращения О1О2, называется полюсом передачи. Расстояния от центров вращения звеньев до полюса называются начальными радиусами(rw). Линейная скорость звена 1 в точке контакта v1 = ω1·O1M; звена 2 – v2 = = ω2·O2M. Проекции скоростей  и
и  на общие нормаль и касательную в точке контакта обозначим v1n, v2n и v1τ, v2τ. Убедимся, что треугольник, образованный векторами скоростей v1n,v1τ и v1, подобен треугольнику O1N1M, а треугольник скоростей v2n, v2τ, v2 – треугольнику O2N2M. Из подобия рассмотренных треугольников
на общие нормаль и касательную в точке контакта обозначим v1n, v2n и v1τ, v2τ. Убедимся, что треугольник, образованный векторами скоростей v1n,v1τ и v1, подобен треугольнику O1N1M, а треугольник скоростей v2n, v2τ, v2 – треугольнику O2N2M. Из подобия рассмотренных треугольников
 .
.
Но согласно кинематическому условию v1n = v2n или ω1·O1N1 = ω2·O2N2, поэтому ω1/ω2 = O2N2/O1N1.На основании подобия треугольников O1N1P и O2N2P имеем О2N2/O1N1 = N2P/N1P = O2P/O1P. Тогда ω1/ω2 = N2P/N1P или
ω1/ω2 =  . (2.15)
. (2.15)
Отношение угловых скоростей (передаточное отношение) звеньев высшей кинематической пары обратно пропорционально начальным радиусам, и при неизменном положении полюса оно постоянно.
Скорость относительного скольжения звеньев в точке их касания равна геометрической разности проекций скоростей на общую касательную
vck = v1τ – v2τ = ω1×N1M – ω2 ×N2M =
= ω1(N1P + PM) – ω2(N2P – PM) = PM(ω1 + ω2).
Как видно, при совмещении точки зацепления с полюсом передачи (РМ = 0) скольжение профилей отсутствует и имеет место только их перекатывание.
Из рассмотренного следует, что передача движения в высшей кинематической паре может происходить двояко: а) за счет перекатывания звеньев друг по другу без скольжения, когда движение передается за счет сил трения, возникающих в зоне контакта этих звеньев при надавливании их друг на друга (например, фрикционные передачи); б) за счет взаимного давления звеньев, очерченных по определенным профилям (кулачковые, зубчатые механизмы). В этом случае между касающимися профилями происходит не только перекатывание, но и относительное скольжение. В действительности и первый вид движения сопровождается проскальзыванием.
Кинематика механизмов с высшими кинематическими парами, в частности фрикционных, рассмотрена в подразд. 13.2, зубчатых – в подразд. 14.7.
Глава 3. ДИНАМИКА МЕХАНИЗМОВ
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 603; Нарушение авторских прав?; Мы поможем в написании вашей работы!