КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Задачи и методы кинематического анализа плоских механизмов
|
|
|
|
Классификация механизмов
Механизмы, входящие в состав любой машины или прибора, весьма разнообразны. С точки зрения их функционального назначения они делятся на следующие виды: механизмы двигателей и преобразователей; передаточные механизмы; исполнительные механизмы; механизмы настройки, подачи, транспортирования; механизмы управления, контроля и регулирования.
Механизмы решают задачи преобразования одних видов движений в другие, например, вращательного в поступательное, и задачи изменения скорости при сохранении вида движения, например, уменьшение числа оборотов двигателя до числа оборотов основного ведомого (рабочего) звена. В последнем случае одним из основных параметров механизма является передаточное отношение i, которое определяется как отношение угловых скоростей ведущего и ведомого k-го звеньев механизма, т.е. i1,k = n1 / nk, или i1,k = ω1 / ω k, где угловая скорость звеньев задается в оборотах за минуту (n) или в радианах за секунду (ω = 2πn / 60). Если механизм служит для понижения угловой скорости, его называют редуктором, если для повышения – мультипликатором.
Механизмы, служащие для передачи вращательного движения с преобразованием скорости (фрикционные, зубчатые), называют также передачами.
В зависимости от конструктивных особенностей и способа передачи движения между подвижными звеньями механизмы делят на шарнирно-рычажные; фрикционные; зубчатые; кулачковые; винтовые; с гибкими звеньями. Рассмотрим подробнее названные виды механизмов, учитывая их кинематические свойства и конструктивные особенности.
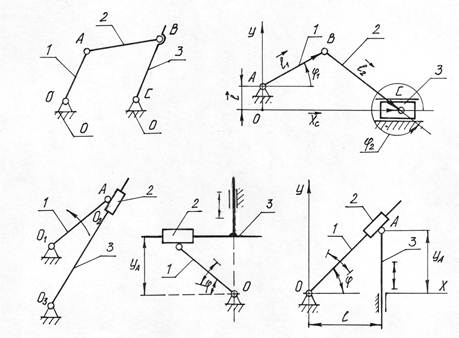
Шарнирно-рычажные механизмы. В шарнирно-рычажных механизмах жесткие звенья типа стержней, рычагов соединяются вращательными и поступательными кинематическими парами. Шарнирно-рычажные механизмы применяются для преобразования вращательного или поступательного движения в любое движение с требуемыми параметрами. Наибольшее распространение получили плоские четырехзвенные механизмы с тремя подвижными и одним неподвижным звеньями. Родоначальником этой группы является шарнирный четырехзвенник (рис. 1.6), служащий для преобразования равномерного вращения ведущего звена I в неравномерное вращение звена 3. Звенья I и 3 называются кривошипами, если они поворачиваются на угол более 2π, и коромыслами, если совершают качательное движение. Звено 2, совершающее плоское движение, называют шатуном. В зависимости от соотношения длин звеньев механизма рабочее звено 3 может быть кривошипом или коромыслом.
|
|
|
|
|
|
Широко применяются кривошипно-ползунные механизмы (рис. 1.7), используемые для преобразования вращательного движения в поступательное и наоборот; с их помощью можно (при равенстве длин кривошипа I и шатуна 2) определить, измеряя перемещение поступательно движущегося звена (ползуна) 3, значения синуса и косинуса угла поворота кривошипа. Конструктивно кривошипно-ползунные механизмы выполняются по двум схемам: внецентральные (рис. 1.7), у которых линия движения ползуна смещена на эксцентриситет е относительно оси вращения кривошипа; и простые, эксцентриситет которых равен нулю (е = 0).
К четырехзвенным относится большая группа кулисных механизмов, особенностью которых является наличие ползуна, перемещающегося в подвижной направляющей – кулисе (рис. 1.8, а). Кулиса 3 в зависимости от соотношения размеров звеньев, может совершать вращательное (О1А > О1О2) или качательное (О1А < О1О2) движения. Кулисные механизмы позволяют получать большой коэффициент изменения средней скорости ведомого звена (до 2,5) и применяются в системах, требующих быстрого обратного хода.
Разновидностью кулисного является синусный механизм (рис. 1.8, б). Он преобразует вращательное движение кривошипа I в возвратно-поступательное движение кулисы 3. Название механизма связано с тем, что перемещение yА кулисы 3 пропорционально синусу угла поворота кривошипа φ. На рис. 1.8, в показан тангенсный механизм, который позволяет определить тангенс угла поворота кривошипа I tgφ = yА / l. Применяются и более сложные рычажные механизмы, состоящие из 6 и более звеньев.
Фрикционные механизмы применяются в приводах систем, в устройствах транспортирования различных носителей информации. Передача движения в них осуществляется за счет сил трения между звеньями.
Фрикционные механизмы разнообразны по конструкции. Различают механизмы с постоянным (рис. 1.9, а, б) и переменным передаточным отношением (вариаторы) (рис. 1.9, в), с твердыми (жесткими) звеньями и с гибкой связью (рис. 1.9, г).
|
|
|
|
|
|
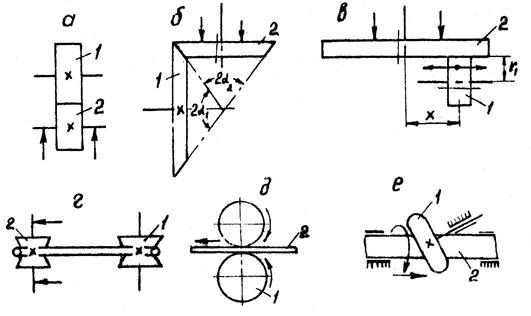
Рис. 1.9
По относительному расположению осей звеньев различают механизмы с параллельными (рис. 1.9, а) и пересекающимися (рис. 1.9, б) осями. Фрикционные передачи служат для преобразования вращательного движения ведущего звена во вращательное с другой скоростью (рис. 1.9, а, б, в), прямолинейное (рис. 1.9, д) или винтовое движение ведомого звена 2 (рис. 1.9, е).
Кроме бесступенчатого изменения скорости ведомого звена, достоинствами фрикционных механизмов являются простота конструкции, автоматическое предохранение от поломок при перегрузках, плавность передачи движения. К недостаткам рассматриваемых механизмов следует отнести непостоянство передаточного отношения из-за проскальзывания, наличие усилия, сжимающего катки и усиленный в связи с этим износ звеньев.
Зубчатые механизмы получли наибольшее распространение благодаря ряду достоинств: компактности; высокому КПД; надежности работы; простоте ухода; возможности применения в широком диапазоне скоростей и передаточных отношений; сохранению с большой точностью заданного передаточного отношения. Передача движения в них осуществляется зацеплением зубьев подвижных звеньев – зубчатых колес. К недостаткам зубчатых механизмов необходимо отнести: сложность и высокую точность изготовления и сборки звеньев; шум при больших окружных скоростях колес.
Зубчатые механизмы служат для передачи вращательного движения с преобразованием скорости (рис. 1.10, а–д); для преобразования возвратно-вращательного движения в возвратно-поступательное и наоборот(рис. 1.10, е).
|
|
|
|
|
|
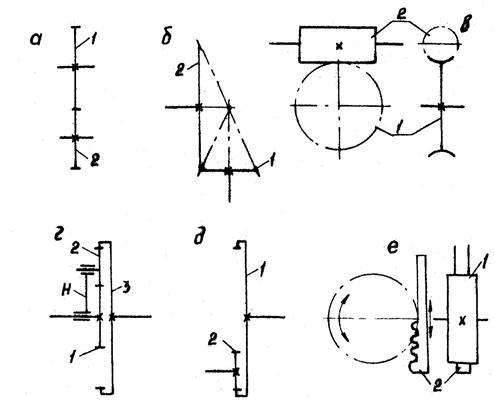
Рис. 1.10
Простейшая одноступенчатая зубчатая передача состоит из стойки и двух подвижных звеньев – зубчатых колес. Колеса образуют со стойкой вращательные пары 5-го класса, а друг с другом – высшую кинематическую пару
4-го класса, называемую зубчатым зацеплением. По характеру относительного расположения осей вращения зубчатых колес различают механизмы с параллельными (рис. 1.10, а), пересекающимися (рис. 1.10, б) и перекрещивающимися в пространстве осями (рис. 1.10, в).
По виду зацепления или характеру расположения зубьев на теле зубчатых колес различают передачи с внешним (рис. 1.10, а) и внутренним (рис. 1.10, д) зацеплением. При внешнем зацеплении колеса с параллельными осями вращаются в разные стороны, при внутреннем – в одну.
Зубчатые передачи могут быть с постоянным и переменным передаточным отношением. Применяют их для понижения и для повышения угловой скорости. В зависимости от назначения передачи и специфических требований (износостойкость, бесшумность) зубья колес могут быть прямыми, косыми, шевронными и криволинейными. Зубчатые механизмы можно классифицировать еще по числу подвижных звеньев, профилю боковых поверхностей зубьев и другим признакам.
По профилю зуба различают: эвольвентные, циклоидные, часовые, цевочные передачи, передачи Новикова и др. Наибольшее применение получили эвольвентные передачи благодаря простоте технологии изготовления, большой кинематической точности, малой чувствительности к изменению меж-осевого расстояния.
В особую группу зубчатых передач можно выделить эпициклические передачи, основным признаком которых является наличие колес с подвижными геометрическими осями (рис. 1.10, г). Колеса 1, 3, имеющие неподвижные геометрические оси, называют центральными; колесо 2 с подвижной геометрической осью называют сателлитом; звено (Н), вращающее оси сателлитов, носит название водила. Эпициклические передачи, имеющие одну степень подвижности, называются планетарными, а две – дифференциальными. Рассматриваемые передачи позволяют снимать с одного вала движения с различными скоростями, что широко используется в шкальных механизмах. Эпициклические передачи при малых габаритах позволяют получать большие передаточные отношения.
Кулачковые механизмы широко применяются в устройствах управления, прерывистого движения.
Простейший кулачковый механизм (рис. 1.11, а) состоит из кулачка 1, толкателя 2 и стойки, образуя в точке А высшую кинематическую пару 4-го класса. Ведущее звено 1 называется кулачком или эксцентриком. Форма профиля кулачка определяется законом движения толкателя и может быть самой разнообразной, как и закон движения ведомого звена. Кулачковые механизмы позволяют получать любой закон движения ведомого звена, отличаются своей простотой и компактностью, малыми габаритами.
К недостаткам кулачковых механизмов следует отнести большие удельные давления в высшей паре, и следовательно, недолговечность механизма, а также необходимость в силовом замыкании звеньев. Возможно геометрическое замыкание с помощью пазов в кулачке, который направляет движение ведомого звена.
Величина перемещений или закон движения рабочего звена механизма определяется профилем кулачка.
|

|
|
|
|
|
Рис. 1.11
По виду преобразуемых движений кулачковые механизмы можно разделить на следующие группы: механизмы, в которых вращательное движение кулачка 1 преобразуется в возвратно-поступательное или качательное движение толкателя 2 (см. соответственно рис. 1.11, а, б); механизмы, в которых возвратно-поступательное движение кулачка 1 преобразуется в возвратно-поступательное или качательное движение толкателя 2 (см. соответственно рис. 1.11, в, г); пространственные или коноидные кулачковые механизмы, решающие функции двух переменных, например, φ2 = φ2 (x, φ) (см. рис. 1.11, д). Эти механизмы имеют две степени свободы. Применяются они в передающих устройствах.
Толкатели кулачковых механизмов в зависимости от вида кинематического элемента толкателя подразделяются на: точечные (см. рис. 1.11, д), плоские и тарельчатые (см. рис. 1.11, а), с профилем, очерченным по радиусу или сфере, роликовые или шариковые (см. соответственно рис. 1.11, в, г).
Винтовые механизмы состоят из винта и гайки и предназначены для преобразования вращательного движения в прямолинейное и наоборот. Они обеспечивают высокую точность поступательных перемещений, большой выигрыш в силе. Недостатком являются большие потери на трение в паре винт – гайка, низкий КПД. Применяются винтовые механизмы в измерительных приборах; механизмах точных перемещений, регулирования и настройки; в подъемно- транспортных устройствах.
При вращении винта 1 (рис. 1.12) гайка 2 поступательно перемещается в направляющих стойки 3. Возможно использование схемы, когда ведущим звеном является зафиксированная в осевом направлении вращающаяся гайка, а ведомым – винт, движущийся поступательно в направляющих стойки.
Имеются конструкции кинематической пары винт – гайка с трением скольжения и с трением качения.
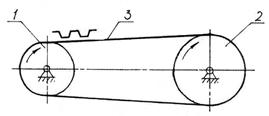
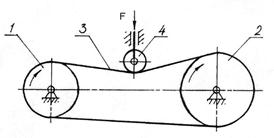
Механизмы с гибкими звеньями применяют для передачи вращательного движения между валами при больших межосевых расстояниях и для преобразования вращательного движения в поступательное и наоборот. Ведущее и ведомое жесткие звенья таких механизмов не имеют между собой непосредственного контакта, а передача движения осуществляется посредством гибкого звена, которое может быть как замкнутым, так и разомкнутым. По характеру соединения гибкого звена с ведущим и ведомым звеньями рассматриваемые механизмы подразделяют на передачи трением, передачи зацепления и передачи с жестким креплением гибкого звена к другим звеньям. В передачах трением в качестве гибкого звена используют плоские и клиновидные ремни, пассики, круглые шнуры и ремни, нити (рис. 1.13, б). Передача состоит из ведущего 1 и ведомого 2 шкивов, а также замкнутого звена 3, надетого на шкивы с натяжением. Таким передачам присущи все достоинства и недостатки фрикционных механизмов непосредственного касания. Необходимым условием нормальной работы передачи трением является натяжение гибкого звена, что достигается обычно при помощи натяжного ролика 4. В передачах зацепления гибким звеном служит зубчатый ремень, перфорированная лента, цепь. Преимущества этих передач (см. рис. 1.13, а) перед передачами трением соответствуют преимуществам зубчатых передач по отношению к фрикционным.
а б
Рис. 1.13
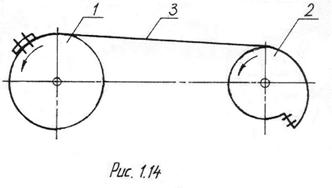
В передачах с жестким креплением разомкнутого гибкого звена к ведущему 1 и ведомому 2 звеньям (рис. 1.14) исключается возможность его проскальзывания, чем обеспечивается точность передачи. Недостатком таких передач является ограничение вращения ведущего и ведомого звеньев в одном направлении углом, меньшим 2π.
|
Глава 2. Кинематика плоских механизмов
Основными задачами кинематического анализа механизмов являются определение положений звеньев и построение необходимых траекторий их точек; определение линейных скоростей и ускорений этих точек, а также угловых скоростей и ускорений звеньев.
При кинематическом анализе механизмов движение звеньев изучают без учета сил, вызывающих это движение. Недостаточно знать структуру механизма: число звеньев, число и класс кинематических пар. Необходимо также знать размеры отдельных звеньев, их взаимное положение. Поэтому составляют так называемую кинематическую схему механизма, которая является «скелетом», строение которого определяет возможные перемещения звеньев механизма. Взаимное расположение звеньев механизма меняется, но в фиксированный момент времени оно определенно. При кинематическом анализе кинематическая схема строится в выбранном масштабе μℓ (м / мм) с учетом размеров и некоторых форм звеньев. Вначале изображают по заданным координатам неподвижные элементы звеньев: неподвижные оси вращения, направляющие. Затем изображают в заданном положении ведущее звено (звенья), а положения ведомых звеньев находят методом геометрических мест (методом засечек). При составлении схем применяются условные изображения кинематических пар, звеньев. Звенья обозначают цифрами, а кинематические пары – буквами.
Для большинства механизмов характерно периодическое движение. Под периодом подразумевается промежуток времени, по истечении которого механизм возвращается в исходное положение и его кинематические параметры (положения, скорости, ускорения) принимают первоначальные значения. Поэтому кинематическое исследование механизмов ограничим пределами только одного периода. Данное исследование можно проводить аналитическим, графоаналитическим или экспериментальными методами.
Аналитический метод исследования дает общее решение и точный результат, но приводит к сложным математическим преобразованиям. Роль аналитических методов кинематического анализа механизмов особенно возросла в последние годы в связи с широким применением вычислительной техники, позволяющей получить необходимые результаты с любой степенью точности.
Графоаналитический метод исследования применим к любому механизму, но при всей своей простоте и наглядности довольно трудоемок, а его результаты не являются достаточно точными.
Экспериментальные методы кинематического исследования требуют уникального и специального оборудования и применяются в исключительных случаях.
Чтобы решить задачу кинематического исследования механизмов любым из указанных выше методов, должны быть заданы:
– кинематическая схема механизма и размеры его звеньев;
– закон движения ведущего звена (звеньев).
Основным назначением механизма является выполнение требуемых движений. По результатам кинематического исследования, по кинематическим параметрам можно судить, насколько успешно решена одна из основных задач проектирования механизма – выбрана кинематическая схема и определены размеры звеньев. Поэтому для создания механизма, наилучшим образом отвечающего поставленным требованиям, необходимо знать методы определения его кинематических параметров. Знание этих параметров важно и для динамических расчетов.
2.2. Аналитический метод кинематического исследования
механизмов
Функция положения. Под функцией положения механизма понимается зависимость qk = qk(q), связывающая положение ведомого (k-го) и ведущего звеньев механизма. Здесь qk – параметр, определяющий положение ведомого звена; q – независимая переменная, определяющая положение ведущего звена. Функция положения является геометрической характеристикой механизма. Вместе с тем ее можно использовать при кинематическом исследовании, если задать закон движения ведущего звена, q = q(t). Зависимость qk = qk(t) представляет закон движения ведомого звена.
Если ведущее звено входит во вращательную пару со стойкой (см. рис. 1.3, а), то функция положения задается в виде qk = qk(φ), где φ – угол поворота ведущего звена. Если ведущее звено входит в поступательную пару (рис. 1.3, в), то функция положения задается в виде qk = qk(S), где S – перемещение произвольно выбранной точки ведущего звена относительно неподвижной системы координат, связанной со стойкой.
Передаточная функция. Аналоги скоростей и ускорений. Передаточная функция представляет собой первую производную от функции положения ведомого звена по углу поворота или линейному перемещению ведущего:  .
.
Мгновенное значение передаточной функции определяет отношение мгновенных скоростей ведомого и ведущего звеньев. Если угол поворота φk задан в виде функции φk = φk (φ), то угловая скорость ωk этого звена может быть представлена так:
 , (2.1)
, (2.1)
где ω – угловая скорость ведущего звена, имеющая размерность рад/с;  – передаточная функция или аналог угловой скорости k-го звена.
– передаточная функция или аналог угловой скорости k-го звена.
При одинаковых видах движения ведомого и ведущего звеньев передаточная функция обозначается буквой ikn и называется передаточным отношением от звена k к звену n.
Дифференцируя уравнение (2.1) по времени t, получим величину углового ускорения εk k-го звена:
 , (2.2)
, (2.2)
где  – аналог углового ускорения k-го звена; ε – угловое ускорение ведущего звена.
– аналог углового ускорения k-го звена; ε – угловое ускорение ведущего звена.
Аналогично могут быть получены уравнения для скорости и ускорения любой точки звена.
Таким образом, скорости и ускорения звеньев и их точек могут быть всегда выражены через соответствующие аналоги скоростей и ускорений и угловые скорость и ускорение ведущего звена механизма.
Применим аналитический метод кинематического исследования к кривошипно-ползунному механизму (см. рис. 1.7). За ведущее звено механизма примем кривошип 1 и будем считать, что известна зависимость q = φ1 = ωt. Аналитическое исследование механизмов удобнее всего вести методом векторных контуров. Схему каждого плоского шарнирно-рычажного механизма можно представить в виде замкнутого многоугольника, состоящего из одного или нескольких замкнутых векторных контуров. Звенья механизма изображаются векторами, причем, если звено имеет неподвижную точку, вектор желательно изображать выходящим из нее. Для каждого такого контура можно составить векторное уравнение замкнутости, развертываемое далее в два уравнения проекций контура на оси прямоугольной системы координат. Представим контур ОАВСО как сумму векторов
 . (2.3)
. (2.3)
Проектируя (2.3) на оси ОХ и ОY, соответственно получим:
 cos φ1 +
cos φ1 +  cos φ2 = xc;
cos φ2 = xc;
ℓ + sin φ1 + sin φ2 = 0. (2.4)
Из второго уравнения (2.4) имеем sin φ2 = –  .
.
Так как вектор  может находиться только в первой или четвертой четвертях, то cos φ2 всегда положителен. Использовав первое уравнение (2.4), получим функцию положения звена 3 или точки С:
может находиться только в первой или четвертой четвертях, то cos φ2 всегда положителен. Использовав первое уравнение (2.4), получим функцию положения звена 3 или точки С:
 . (2.5)
. (2.5)
Для определения передаточной функции i21 шатуна 2 и аналога линейной скорости vcφ точки С звена 3 дифференцируем уравнения (2.4) по углу поворота φ1:
–  sin φ1 – i21 sin φ2 = vcφ;
sin φ1 – i21 sin φ2 = vcφ;
cos φ1 + i21  cos φ2 = 0. (2.6)
cos φ2 = 0. (2.6)
Из уравнений (2.6) находим:
i21 =  ;
;
vcφ =  . (2.7)
. (2.7)
Дифференцируя по φ1 уравнения (2.6), получаем
– cos φ1 – i212 cos φ2 – i'21 sin φ2 = a cφ;
– sin φ1 – i212 sin φ2 + i'21 cos φ2 = 0, (2.8)
где i '21 =  и a cφ =
и a cφ =  – аналоги соответствующих углового и линейного ускорений. Выразив из уравнений (2.8) i'21 и a cφ, определим действительные скорости vc и ω2 и ускорения a c и ε2 соответственно звеньев 3 и 2:
– аналоги соответствующих углового и линейного ускорений. Выразив из уравнений (2.8) i'21 и a cφ, определим действительные скорости vc и ω2 и ускорения a c и ε2 соответственно звеньев 3 и 2:
vc = ωvcφ; ω2 = ω i 21;
a c = ω2 a cφ + ε vcφ; ε2 = ω2 i '21 + ε i 21. (2.9)
При ω = const и ε = 0;
a c = ω2 a cφ и ε2 = ω2 i '21. (2.10)
2.3. Графоаналитические методы кинематического исследования
механизмов
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2200; Нарушение авторских прав?; Мы поможем в написании вашей работы!