КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Способы нахождения возможных перемещений
|
|
|
|
Пример 2
Эллиптический маятник (модель грузоподъёмной самоходной машины или крана) состоит из ползуна 1, материальной точки В и соединяющей их нити АВ = l (рис. 1.12). Движение системы происходит в плоскости рисунка.
Определим число стержней свободы.
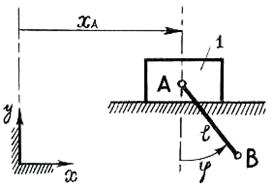 Ползун движется по горизонтальной направляющей поступательно (т.е. обладает одной степенью свободы). Точка В, вынужденная оставаться на плоскости рисунка, имеет 2 степени свободы (см. рис. 1.3). На систему наложена дополнительно внутренняя гео-метрическая связь
Ползун движется по горизонтальной направляющей поступательно (т.е. обладает одной степенью свободы). Точка В, вынужденная оставаться на плоскости рисунка, имеет 2 степени свободы (см. рис. 1.3). На систему наложена дополнительно внутренняя гео-метрическая связь  . Следовательно,
. Следовательно,  = 1 + 2 –1 = 2.
= 1 + 2 –1 = 2.
|
В качестве обобщенных координат можно принять:  (рис. 1.12).
(рис. 1.12).
В этом случае:

 ;
;
 .
.
Таким образом, координаты точек системы выражены через принятые обобщённые координаты  и
и  , или иначе: положение системы определено однозначно через и .
, или иначе: положение системы определено однозначно через и .
Поскольку обобщённые координаты между собой независимы, то каждую из них можно изменять, оставляя остальные неизменными. Если таким способом мысленно бесконечно мало изменять положение системы, то получим её различные возможные перемещения. Естественно, что при этом и точки системы будут получать какие-то свои возможные перемещения. Все они называются частными возможными перемещениями точек, происходящими от изменения одной из обобщённых координат и обозначаются  и т.п. Индексы 1, 2 и т.д. указывают порядковый номер той обобщённой координаты
и т.п. Индексы 1, 2 и т.д. указывают порядковый номер той обобщённой координаты  , которая изменяется на бесконечно малую величину
, которая изменяется на бесконечно малую величину  и т.д. Конечно, можно дать системе возможное перемещение сразу изменив несколько или все
и т.д. Конечно, можно дать системе возможное перемещение сразу изменив несколько или все  . В реальных условиях действительные перемещения системы и её точек происходят, как правило, при одновременном изменении всех обобщённых координат на
. В реальных условиях действительные перемещения системы и её точек происходят, как правило, при одновременном изменении всех обобщённых координат на  и т.д. Такие действительные перемещения точек системы представляют собой полные дифференциалы функций S независимых переменных (по числу степеней свободы):
и т.д. Такие действительные перемещения точек системы представляют собой полные дифференциалы функций S независимых переменных (по числу степеней свободы):
 , (1.6)
, (1.6)
в которых слагаемыми являются частные дифференциалы функций 
Аналогично вычисляются и полные возможные перемещения точек системы:
 (1.7)
(1.7)
В отличие от полных и частных дифференциалов функции S переменных они называются полными и частными вариациями этих функций.
Найдём, например  в примерах, рассмотренных выше.
в примерах, рассмотренных выше.
Кривошипно-ползунный механизм (см. рис. 1.11)
Пусть  . Тогда, варьируя функции
. Тогда, варьируя функции  , получаем:
, получаем:
 ;
;
 ;
;

Аналогично находим вариации декартовых координат точек эллиптического маятника (см. рис. 1.12). Варьируя функции (г), (д), (е), получим:
 ;
;
 ;
;
 .
.
Рассмотренный приём вычисления возможных перемещений точек (путём варьирования функций) является аналитическим. Его легко реализовать на компьютерах, предварительно записав сами функции, которые подвергаются этой операции.
Существует и геометрический способ. Он обладает большей наглядностью, но надо быть очень аккуратным в построениях и соответствующих вычислениях. Кроме этого обязательным является хорошее знание кинематики. С этими приёмами более подробно мы познакомимся при рассмотрении принципа возможных перемещений и при решении задач с его применением.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 888; Нарушение авторских прав?; Мы поможем в написании вашей работы!