КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 4
|
|
|
|
К исследованию равновесия системы
Применение принципа возможных перемещений
Принцип возможных перемещений позволяет провести предварительный анализ возможности нахождения системы в равновесии без учёта конкретных сил, действующих на неё. С этой целью рассматриваются те перемещения, которые могут получить точки и тела, входящие в систему, без нарушения наложенных на неё связей (как внешних, так и внутренних), т.е. рассматриваются возможные перемещения системы. Это особенно важно выполнить в случае сложных конструкций, сооружений и механизмов.
Как это осуществляется, рассмотрим на примерах исследования возможности равновесия составных конструкций.
Конструкция состоит из трёх невесомых балок  и
и  соединённых между собой внутренними шарнирами
соединённых между собой внутренними шарнирами  и
и  (рис. 2.4).
(рис. 2.4).

Рис. 2.4
К балкам приложены силы  (некоторые из них могут быть приложены к внутренним шарнирам, как, например, сила
(некоторые из них могут быть приложены к внутренним шарнирам, как, например, сила  ). Для удержания конструкции в равновесии предполагается установить внешние связи (неподвижные и подвижные шарнирные опоры, жёсткую заделку, стержневые связи и т.п.), рис. 2.5, 2.6. и 2.7. Выяснить, при каком из этих способов крепления конструкция будет находиться в равновесии.
). Для удержания конструкции в равновесии предполагается установить внешние связи (неподвижные и подвижные шарнирные опоры, жёсткую заделку, стержневые связи и т.п.), рис. 2.5, 2.6. и 2.7. Выяснить, при каком из этих способов крепления конструкция будет находиться в равновесии.
Начнём с исследования возможных перемещений системы, закреплённой так, как показано на рис. 2.5, а: в точке О – жёсткая заделка, в точках  и Е – опорные стержни 1 и 2.
и Е – опорные стержни 1 и 2.
Очевидно, что жёсткая заделка O обеспечивает неподвижность балки OA и поэтому шарнир A, соединяющий балки OA и AB, является неподвижным (рис. 2.5, б).
Балка AB оказалась закреплённой при помощи неподвижной шарнирной опоры А и стержня 1 (рис. 2.5, в). Эти связи обеспечивают её неподвижность.
В таком же состоянии оказывается и часть BD составной конструкции, т.к. точка B неподвижна (рис. 2.5, г).
Следовательно, наложенные связи обеспечивают неподвижность всей конструкции в целом независимо от сил, приложенных к ней.
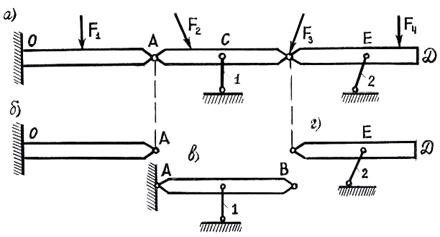
Рис. 2.5
Рассмотрим второй вариант закрепления конструкции (рис. 2.6, а): в точке O – неподвижная шарнирная опора, в точке С – подвижная шарнирная опора, в точке E – опорный стержень.
Т.к. точка O неподвижна, то балка OA может поворачиваться вокруг неё (рис. 2.6, б).
При таком повороте внутренний шарнир может перемещаться по дуге окружности радиуса OA. Но в виду малости возможных перемещений эту дугу можно заменить отрезком прямой, перпендикулярной к самой прямой OA (рис. 2.6, в).
Точка балки C, где закреплена подвижная шарнирная опора, может перемещаться только горизонтально (параллельно опорной поверхности), рис. 2.6, г. Поэтому балка ACB перемещается таким образом, что её точка A может двигаться вертикально, а точка C – горизонтально (рис. 2.6, д). Такие бесконечно малые перемещения характерны для плоскопараллельного движения (две точки тела движутся по каким-то различным траекториям). Найдём положение мгновенного центра поворота тела ACB (МЦС тела), восстановив перпендикуляры к направлениям известных перемещений. Получаем, что МЦС тела совпадает с точкой C. Вокруг неё и может произойти бесконечно малый поворот тела ACB, при котором точка B переместится по бесконечно малой дуге радиуса CB. Эту дугу заменяем отрезком прямой, перпендикулярной CB (рис. 2.6, е).
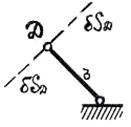
Но точка B принадлежит и телу BED, которое имеет стержневую связь в точке E. Перемещение этой точки может происходить только по дуге, радиус которой равен длине стержня 2. Эту дугу тоже заменяем бесконечно малым отрезком прямой, перпендикулярной самому стержню 2 (рис. 2.6, ж).
И, таким образом, получаем картину перемещений тела BED, где точка B движется вертикально, а точка E – перпендикулярно опорному стержню 2. Это – тоже плоскопараллельное движение. Оно эквивалентно мгновенному, бесконечно малому повороту тела BED вокруг его МЦС, которое в данном случае совпадает с точкой E. Следовательно, балка BED может перемещаться и вся конструкция тоже. Итоговая картина возможных перемещений всей конструкции показана на рис. 2.6, з. Может ли она находиться в равновесии, зависит от конкретных условий (силы, размеры). Если будет выполняться уравнение возможных работ (2.1), то равновесие будет иметь место, в противном случае – нет.
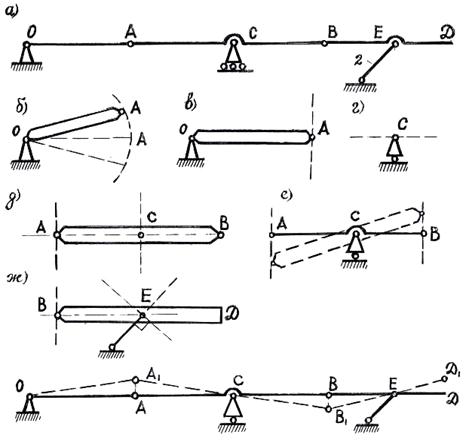
Рис. 2.6
Наконец, рассмотрим вариант крепления составной конструкции, показанный на рис. 2.7, а: в точке  – неподвижная шарнирная опора, в точках
– неподвижная шарнирная опора, в точках  и
и  – опорные стержни.
– опорные стержни.
 а)
а)
| |
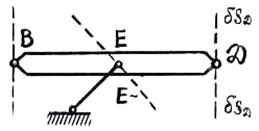 б)
б)
|  в)
в)
|
| Рис. 2.7 |
Рассуждая точно так же, как в предыдущем случае, придём к тому, что точка  является МЦС тела BED. Но для того, чтобы балка BED могла перемещаться поворотом вокруг МЦС, возможные перемещения точки , принадлежащей BED с одной стороны, и точки D, принадлежащей стержню 3, с другой, были совместимы (должны совпадать прямые, по которым нужно перемещаться точке D балки BED и точке D стержня 3. А эти прямые не совпадают (рис. 2.7, б и 2.7, в). То есть перемещение точки D, принадлежащей разным телам, несовместимо. Это означает, что все предполагавшиеся перемещения тел OA, ACB и BED не могут произойти и вся конструкция находится в равновесии независимо от сил, приложенных к ней (система имеет нулевую степень подвижности).
является МЦС тела BED. Но для того, чтобы балка BED могла перемещаться поворотом вокруг МЦС, возможные перемещения точки , принадлежащей BED с одной стороны, и точки D, принадлежащей стержню 3, с другой, были совместимы (должны совпадать прямые, по которым нужно перемещаться точке D балки BED и точке D стержня 3. А эти прямые не совпадают (рис. 2.7, б и 2.7, в). То есть перемещение точки D, принадлежащей разным телам, несовместимо. Это означает, что все предполагавшиеся перемещения тел OA, ACB и BED не могут произойти и вся конструкция находится в равновесии независимо от сил, приложенных к ней (система имеет нулевую степень подвижности).
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 556; Нарушение авторских прав?; Мы поможем в написании вашей работы!