КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 2. На тело, которое находится в равновесии, действует произвольная плоская система сил (рис
|
|
|
|
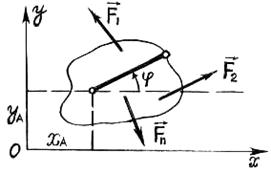
На тело, которое находится в равновесии, действует произвольная плоская система сил  (рис. 2.2). Не нарушая общности можно считать, что плоскость действия сил совпадает с плоскостью рисунка, а вместо тела рассматривается сечение его этой плоскостью – плоское материальное тело. Такое тело обладает тремя степенями свободы. В качестве обобщённых координат примем (как это было в кинематике) координаты некоторой точки А тела и угол поворота тела
(рис. 2.2). Не нарушая общности можно считать, что плоскость действия сил совпадает с плоскостью рисунка, а вместо тела рассматривается сечение его этой плоскостью – плоское материальное тело. Такое тело обладает тремя степенями свободы. В качестве обобщённых координат примем (как это было в кинематике) координаты некоторой точки А тела и угол поворота тела  вокруг этой точки, т.е.
вокруг этой точки, т.е.

|
|
 на величину
на величину  Это означает, что тело «перемещается»
Это означает, что тело «перемещается»
поступательно в направлении оси  на это расстояние, (на самом деле тело находится в равновесии и это «перемещение» – лишь воображаемое нами (см. рис. 1.1).
на это расстояние, (на самом деле тело находится в равновесии и это «перемещение» – лишь воображаемое нами (см. рис. 1.1).
Так как тело находится в равновесии, то на основании (2.1) получаем:
 .
.
Отсюда (т.к.  ):
):
 . (в)
. (в)
Аналогично получается и второе уравнение равновесия:
 . (г)
. (г)
Чтобы получить третье уравнение, зададим телу такое возможное перемещение, при котором  и
и  остаются неизменными, а dq 3 = dj ¹ 0. То есть тело «поворачивается» на бесконечно малый угол
остаются неизменными, а dq 3 = dj ¹ 0. То есть тело «поворачивается» на бесконечно малый угол  вокруг точки
вокруг точки 
Согласно (2.1):
 (суммарная элементарная работа сил,
(суммарная элементарная работа сил,
приложенных к вращающемуся телу).
Так как  , то
, то
 . (д)
. (д)
Уравнения (в), (г) и (д) – искомые аналитические уравнения равновесия свободного твёрдого тела под действием произвольной плоской системы сил.
Пример 3
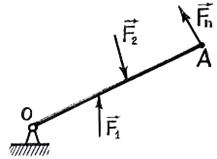
Вывести условие равновесия рычага под действием сил  , приложенных к нему и действующих в плоскости рисунка (рис. 2.3, а).
, приложенных к нему и действующих в плоскости рисунка (рис. 2.3, а).
Рычагом называется твёрдое тело, способное поварачиваться вокруг неподвижной оси и находящееся под действием системы сил, лежащих в плоскости, перпендикулярной к этой оси.
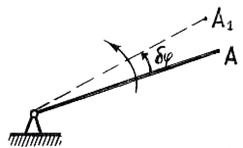
Дадим рычагу возможное перемещение поворотом на угол , например, против часовой стрелки (рис. 2.3, б), так как он обладает одной степенью свободы (см. параграф 1.4).
 а)
а)
|  б)
б)
|
| Рис. 2.3 |
Суммарную возможную работу активных (заданных) сил, приложенных к рычагу, найдём по формуле:
 .
.
Так как в соответствии с принципом возможных перемещений  , а
, а  , то
, то
 .
.
Это и есть искомое условие равновесие рычага.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 586; Нарушение авторских прав?; Мы поможем в написании вашей работы!