КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Моделирование оптимального управления уровнем
В ЁМКОСТИ С ПОМОЩЬЮ ПИ-РЕГУЛЯТОРА
В данном разделе рассматривается задача определения оптимальных настроек ПИ-регулятора уровня жидкости в емкости.
На рисунке 1.1 представлен объект управления и принципиальная схема регулирования уровня жидкости в ёмкости.
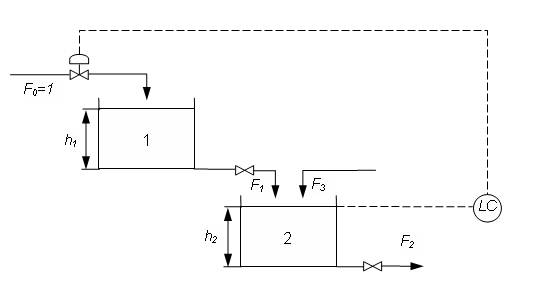
Рисунок 1.1 – Принципиальная схема регулирования уровня жидкости
в ёмкости
Регулирование уровня в емкости осуществляется по принципу отклонения регулируемой величины от заданного значения. Уровень в ёмкости 2 поддерживается на заданном значении регулированием входного потока в ёмкость 1. Эта ёмкость играет роль запаздывания в системе. Задача регулятора заключается в том, чтобы сохранять заданный уровень в ёмкости 2, несмотря на возмущения, которые происходят в потоке F 3.
Уравнения математического описания при постоянной плотности можно записать в следующем виде:
для ёмкости 1: 
для ёмкости 2: 
Уравнения расходов через вентили задаются в виде:
 ,
,  .
.
Возмущения, которые происходят в потоке F 3 смоделируем в виде импульсного возмущения,показанного в протоколе решения задачи (см.рисунок 1.2),
Уравнение пропорционально-интегрального регулятора представим в виде:

Критерий качества регулирования по отклонению регулируемой величины от заданного значения запишем в следующем виде:

Таблица 1.1 – Спецификация принятых обозначений и их размерность.
| Обозначения | Наименование | Размерность |
| a1,a2 | Площади поперечного сечения емкостей | м2 |
| Fi | Расход соответствующего потока,  . .
| 
|

| Уровень жидкости в соответствующей
ёмкости, 
| м |
| k1, k2 | Коэффициенты, характеризующие пропускную способность вентилей емкостей | 
|
| Кр | Пропорциональная составляющая регулятора | - |

| Время изодрома | с |
| АМР | Амплитуда | - |

| Заданное значение уровня во второй емкости h2, который нужно поддерживать постоянным | м |
Математическое описание процесса регулирования уровня в ёмкости представим в виде системы дифференциальных уравнений:
Начальные условия при  :
: 
Третье уравнение системы представляет собой уравнение для ПИ- регулятора, записанное в виде дифференциального уравнения.
Постановка задачи. Для исследуемой системы найти такие значения параметров настройки ПИ-регулятора: коэффициент пропорциональности -Kp и время изодрома-  ,при которых критерий качества регулирования был бы минимальным.
,при которых критерий качества регулирования был бы минимальным.
При интегрировании системы дифференциальных уравнений на каждом шаге решения оптимальной задачи воспользуемся методом Эйлера.
В соответствие с этим методом система дифференциальных уравнений сводится к решению системы рекуррентных соотношений:
 ,
,
где
 ,N-число частей разбиения интервала интегрирования.
,N-число частей разбиения интервала интегрирования.
Для решения оптимальной задачи воспользуемся функцией Minimize в системе компьютерной математики Mathcad.
На следующих рисунках 1.2-1.6 показаны протоколы решения задачи.
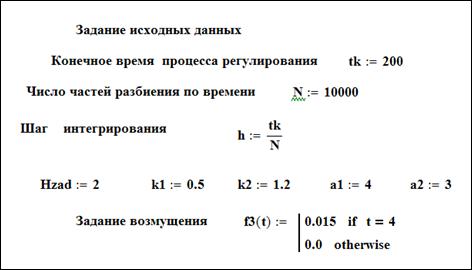
Рисунок 1.2-Задание исходных данных
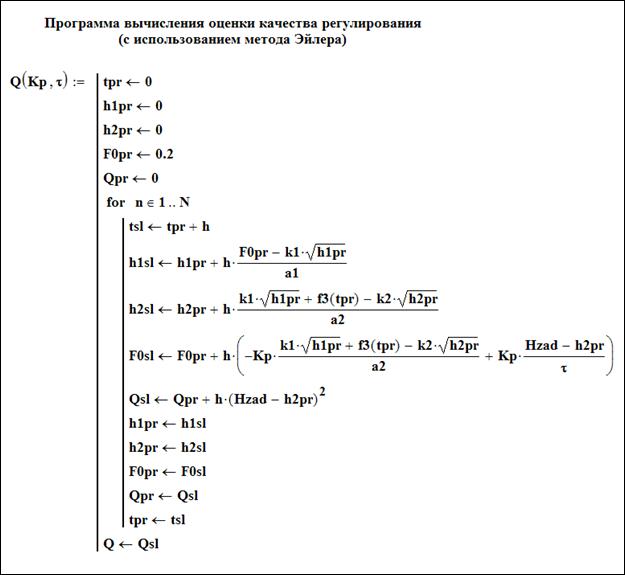
Рисунок 1.3- Программа для вычисления качества регулирования
На рисунке 1.3 представлен фрагмент программы, которая реализует вычисление критерия оптимизации с использованием метода Эйлера.
В ней приняты следующие обозначения:
2.1- Таблица условных обозначений в программе:
| Переменная | Предыдущий шаг | Следующий шаг |
| t | tpr | tsl |

| h1pr | h1sl |

| h2pr | h2sl |
| F0 | F0pr | F0sl |
| Q | Qpr | Qsl |
Интервал времени интегрирования равный 200 с разбит на 10000 частей.
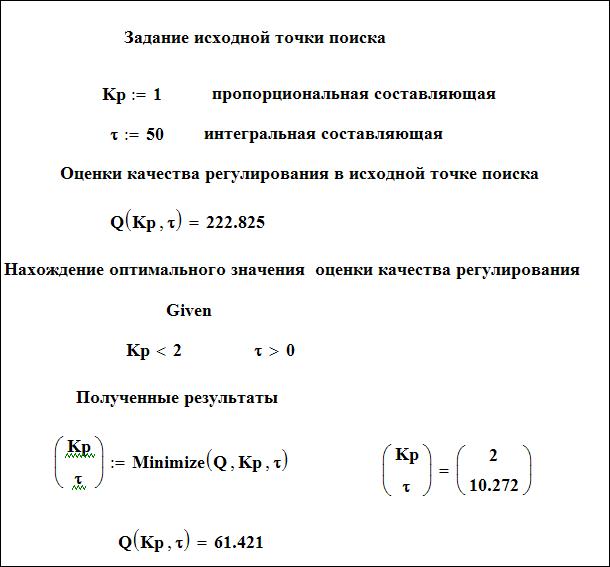
Рисунок 1.4-Решение задачи оптимизации
На рисунке 1.4 представлен фрагмент программы для решения задачи оптимизации с помощью функции Minimize.
На рисунках 1.5 -1.6 представлены результаты проверки найденного оптимального режима и проиллюстрированы полученные результаты при найденных оптимальных настройках регулятора.
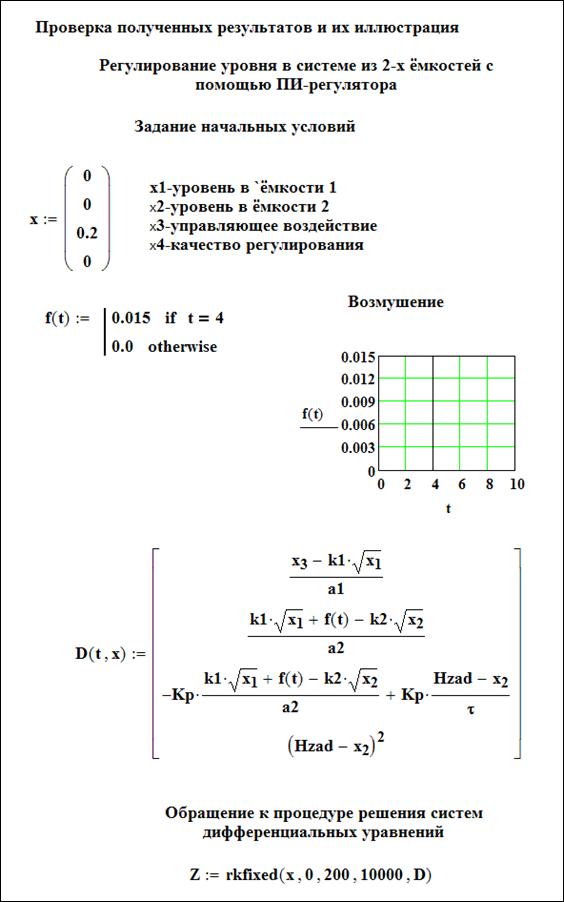
Рисунок 1.5-Проверка полученных результатов

Рисунок 1.6-Результаты моделирования оптимального управления
На рисунке 1.6 представлены результаты моделирования процесса управления уровня в емкости при оптимальных настройках регулятора. Как видно из результатов моделирования значение критерия качества составляет 61.4,при значениях коэффициента пропорциональности равного 2 и времени изодрома -10.3 с. При оптимизации коэффициент пропорциональности был ограничен значением 2,для того чтобы управляющее значение не было слишком большим.
|
|
Дата добавления: 2014-11-29; Просмотров: 648; Нарушение авторских прав?; Мы поможем в написании вашей работы!