КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет координат при избыточном числе измерений навигационных параметров
|
|
|
|
Аналитический вариант расчета координат места судна по двум линиям положения
Линия положения - это касательная к навигационной изолинии в счислимой точке.
Уравнение (2.4), с учетом формул п.1.1, может быть переписано в виде:


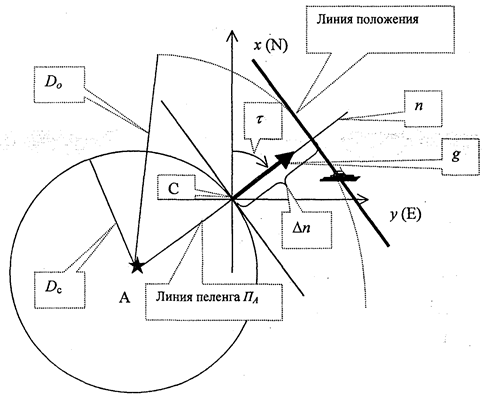
Рис. 2.1. Линия положения
Для определения места судна достаточно измерить два навигационных параметра, т.к. поверхность, на которой ищутся обсервованные координаты, -двухмерная (положение точки определяется двумя координатами).
Алгоритм расчета таков:
а) в момент времени t измеряются два навигационных параметра Uoi и Uo2,
б) на этот же момент времени снимаются счислимые координаты Хс, ус и на них рассчитываются счислимые навигационные параметры Uci и Uc2,
в) для счислимых координат рассчитываются коэффициенты линий положения Дц, т.е. частные производные по навигационным параметрам от навигационных функций;
г) правые части уравнений линий положения рассчитываются по формулам: au]
=U,l-Ucl,^U2=^o2-Vc2;
д) составляется система двух уравнений линий положения, которая может быть переписана в матричном виде:

где А - матрица коэффициентов линий положения, АХ- вектор неизвестных, AU- вектор измерений (вектор свободных членов);
е) решение системы уравнений линий положения (2.6) запишется в виде:

•• /
ж) если обозначить вектор счислимых координат как Хс, а вектор обсервованных координат как Ху, то можно записать:

Так как вследствие линеаризации навигационных функций появляются методические погрешности, то для их компенсации используется итерационная процедура (метод последовательных приближений), т.е. обсервованные координаты принимаются за новые счислимые (Хо=Хс}, и вычисления продолжаются согласно указаниям пп. б), а заканчиваются тогда, когда длина вектора АХ не будет меньше наперед заданной величины е. Для навигационных задач это составляет обычно 2-3 итерации.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 830; Нарушение авторских прав?; Мы поможем в написании вашей работы!