КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Неравноточные измерения
|
|
|
|
В п. 2.3.1 никак не рассматривался вид погрешности измеряемых навигационных параметров, они считались равноточными, т.е. имеющими одинаковые средние квадратические погрешности т.
В общем случае измерения навигационных параметров не являются равноточными, т.е. их средние квадратические погрешности могут отличаться, что и происходит на практике, если измерения выполнены различными приборами или различными наблюдателями. Естественно, что вероятнейшая точка, полученная по МНК, должна быть ближе к той линии положения, которая точнее, а поэтому уравнивание измерений происходит с учетом их весов - величин, обратно пропорциональных квадратам среднеквадратических погрешностей измерений, которые формируют так называемую весовую матрицу. Методика вывода ничем не отличается от предложенной в п. 2.3.1.
Умножим слева правую и левую части уравнения (2.10) на матрицу W, которая имеет следующий вид:
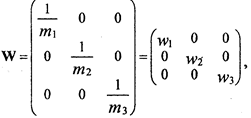
здесь т - средняя квадратическая погрешность измерения соответствующего навигационного параметра. Получим следующее уравнение:

Теперь выражение (2.12) для Q перепишется так:

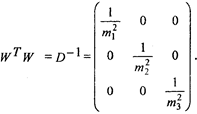
Используя изложенную ранее методику, получим систему нормальных уравнений с учетом неравноточных измерений, предварительно обозначив матрицу H^W-Kav. весовую матрицу D"1:
Система нормальных уравнений запишется:

а решение будет иметь вид'
AX=(ATD~lA)~\ATD~iAU
Если элементы матрицы (2.18) равны, это означает, что измерения равноточные и выражение (2.20) превращается в выражение (2.14). Формула (2.20) имеет более общий характер, чем уравнение (2.14).
Для определения координат опять воспользуемся формулой (2.8). Вероятнейшая точка, полученная по формуле (2.20), определяет средневзвешенные значения координат.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 583; Нарушение авторских прав?; Мы поможем в написании вашей работы!