КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Равноточные измерения
|
|
|
|
Число навигационных измерений при определении места судна очень существенно. Если измеряются два навигационных параметра и определяются две координаты, то говорят, что в задаче отсутствует избыточность, т.е. система уравнений (2.6), как правило, совместна.
Отсутствие избыточности измерений приводит к неконтролируемому влиянию различных видов погрешностей на результат, особенно опасны грубые промахи и систематические погрешности.
Для получения более надежной обсервации применяют избыточные навигационные измерения.
Пусть для определения координат измерены три навигационных параметра (п = 3), а определить нужно две координаты (k = 2). В этой ситуации избыточность r = n-k= 1.
Первоначально систему уравнений линий положения в матричном виде запишем так же, как систему уравнений (2.6):

однако матрицы будут иметь вид:
В данной системе количество неизвестных k меньше, чем количество уравнений п. Решение любых двух уравнений дает положение одной из вершин треугольника. Это означает, что подстановка этого решения в третье уравнение, не обратит его в тождеств \ Такая система называется несовместной, т.е. решение пары уравнений не совместно с третьим. Для получения согласованного решения системы необходимо ввести дополнительные условия. Если предположить, что систе

|
матические погрешности в измерениях отсутствуют, т.е. они определены и исключены специальными приемами измерений, то все остальные погрешности измерений можно считать случайными. Известно, что центром группирования случайных величин является их математическое ожидание или его оценка - среднее значение, которое наиболее близко к истинному значению и имеет минимальную дисперсию. Очевидно, что и в данном случае необходимо
Рис. 2.2. К выводу формулы решения системы уравнений (2.7)
найти некоторое среднее из трех точек, которое будет иметь статус оценки математического ожидания множества, состоящего из трех измерений. Ясно, что эта точка должна быть в фигуре погрешностей, а не вне ее. Несогласованность измерений возникает из-за погрешностей, которые называют невязками системы уравнений.
Теперь вместо системы (2.9), с учетом невязок, более корректно следует записать следующее матричное уравнение (система уравнений поправок):

где V- вектор невязок (погрешностей), который имеет вид:

Если принять, что для получения согласованного решения линии положения необходимо сдвинуть внутрь фигуры погрешностей на некоторые величины v/, v^ и уз соответственно (рис. 2.2), то математическое условие поиска оптимального согласованного решения относительно этого среднего значения (точка О) определится в соответствии с формулой (2.11), т.е. минимальной длиной вектора V:

здесь величины v\, v-г. и уз, выраженные в единицах измерений, называются невяз
| ками, поправками или погрешностями измерений в зависимости от придаваемого им знака. Выражение (2.11) определяет условие решения системы (2.10), а отсюда и название рассматриваемого метода — метод наименьших квадратов. |
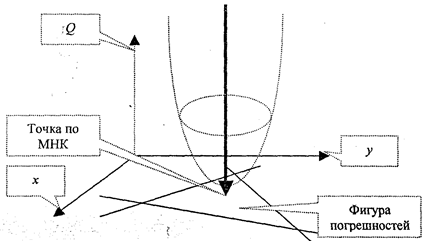
Рис. 2.3. Геометрическая интерпретация МНК
Из формулы (2.10) запишем выражение относительно вектора невязок:


Взяв производную от выражения (2.12) по вектору неизвестных и приравняв ее к нулю, находим формулу для решения системы (2.10):
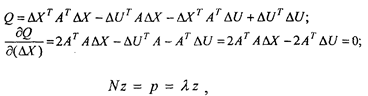
Система (2.13) называется системой нормальных уравнений. Теперь можно записать решение:

Знак «л» над вектором искомых величин свидетельствует о том, что решение получено с применением критерия оптимальности Q, Рис. 2.3 поясняет решение по МНК.
После получения решения, согласно выражению (2.14) относительно счислимой точки в локальной системе координат, используется формула (2.8), а затем вьшолняется итерационная процедура. Точка, положение которой определяется вектором Хо, называется ввроятнвйшвй точкой.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 824; Нарушение авторских прав?; Мы поможем в написании вашей работы!