КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обобщенная сила системы с одной степенью свободы
|
|
|
|
Определение обобщенных сил
Для системы с одной степенью свободы обобщенной силой, соответствующей обобщенной координате q, называют величину, определяемую формулой
 , (1.3)
, (1.3)
где d q – малое приращение обобщенной координаты;  – сумма элементарных работ сил системы на ее возможном перемещении.
– сумма элементарных работ сил системы на ее возможном перемещении.
Напомним, что возможное перемещение системы определяется как перемещение системы в бесконечно близкое положение, допускаемое связями в данный момент времени (подробнее см. прил. 1).
Известно, что сумма работ сил реакций идеальных связей на любом возможном перемещении системы равна нулю. Поэтому для системы с идеальными связями в выражении следует учитывать только работу активных сил системы. Если же связи не идеальны, то силы реакций их, например, силы трения, условно считаются активными силами (см. ниже указания к схеме на рис. 1.5). В включается элементарная работа активных сил и элементарная работа моментов активных пар сил. Запишем формулы для определения этих работ. Допустим, сила  (Fkx,Fky,Fkz) приложена в точке К, радиус-вектор которой есть
(Fkx,Fky,Fkz) приложена в точке К, радиус-вектор которой есть  (xk,yk,zk), а возможное перемещение –
(xk,yk,zk), а возможное перемещение –  (d xk, d yk, d zk). Элементарная работа силы на возможном перемещении равна скалярному произведению
(d xk, d yk, d zk). Элементарная работа силы на возможном перемещении равна скалярному произведению  , которому в аналитической форме соответствует выражение
, которому в аналитической форме соответствует выражение
d А( ) = Fк d rк cos ( ), (1.3а)
), (1.3а)
а в координатной форме – выражение
d А( ) = Fkx d xk + Fky d yk + Fkz d zk. (1.3б)
Если пара сил с моментом М приложена к вращающемуся телу, угловая координата которого есть j, а возможное перемещение dj, то элементарная работа момента М на возможном перемещении dj определяется по формуле
d А(М) = ± M d j. (1.3в)
Здесь знак (+) соответствует случаю, когда момент М и возможное перемещение dj совпадают по направлению; знак (–), когда они противоположны по направлению.
Чтобы можно было по формуле (1.3) определить обобщенную силу, надо возможные перемещения тел и точек в выразить через малое приращение обобщенной координаты d q, используя зависимости (1)…(7) прил. 1.
Определение обобщенной силы Q, соответствующей выбранной обобщенной координате q, рекомендуется производить в следующем порядке.
· Изобразить на расчетной схеме все активные силы системы.
· Дать малое приращение обобщенной координате d q > 0; показать на расчетной схеме соответствующие возможные перемещения всех точек, в которых приложены силы, и возможные угловые перемещения всех тел, к которым приложены моменты пар сил.
· Составить выражение элементарной работы всех активных сил системы на этих перемещениях, возможные перемещения в выразить через d q.
· Определить обобщенную силу по формуле (1.3).
Пример 1.4 (см. условие к рис. 1.1).
Определим обобщенную силу, соответствующую обобщенной координате s (рис. 1.4).
На систему действуют активные силы: P – вес груза; G – вес барабана и вращающий момент M.
Шероховатая наклонная плоскость является для груза А неидеальной связью. Сила трения скольжения Fтр, действующая на груз A со стороны этой связи, равна Fтр = f N.
Для определения силы N нормального давления груза на плоскость при движении воспользуемся принципом Даламбера: если к каждой точке системы помимо действующих активных сил и сил реакций связей приложить условную силу инерции, то образованная совокупность сил будет уравновешенной и уравнениям динамики можно придать форму уравнений равновесия статики [1]. Следуя известной методике применения этого принципа [3], изобразим все силы, действующие на груз A (рис. 1.5), –  и
и  , где – сила натяжения троса.
, где – сила натяжения троса.
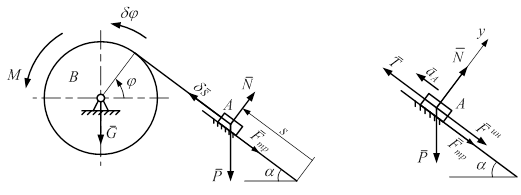
Рис. 1.4 Рис. 1.5
Добавим силу инерции 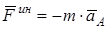 , где
, где  – ускорение груза. Уравнение принципа Даламбера в проекции на ось y имеет вид N – P cos a = 0.
– ускорение груза. Уравнение принципа Даламбера в проекции на ось y имеет вид N – P cos a = 0.
Отсюда N = P cos a. Силу трения скольжения теперь можно определить по формуле Fтр = f P cos a.
Дадим обобщенной координате s малое приращение d s > 0. При этом груз (рис. 1.4) переместится вверх по наклонной плоскости на расстояние d s, а барабан повернется против часовой стрелки на угол dj.
Составим по формулам типа (1.3а) и (1.3в) выражение суммы элементарных работ момента M, сил P и Fтр:
 ;
;
выразим в этом уравнении dj через d s:  , тогда
, тогда
 ;
;
определим обобщенную силу по формуле (1.3)
 ,
,
учтем записанную ранее формулу для Fтр и получим окончательно
 . (б)
. (б)
Если в этом же примере за обобщенную координату взять угол j, то обобщенная сила Qj выразится формулой
 .
.
Рекомендуется самостоятельно проверить достоверность этого результата.
1.4.2. Определение обобщенных сил системы
с двумя степенями свободы
Если система имеет n степеней свободы, ее положение определяют n обобщенных координат. Каждой координате qi (i = 1,2,…, n) соответствует своя обобщенная сила Qi, которая определяется по формуле
 , (1.4)
, (1.4)
где  – сумма элементарных работ активных сил на i -м возможном перемещении системы, когда d qi > 0, а остальные обобщенные координаты неизменны.
– сумма элементарных работ активных сил на i -м возможном перемещении системы, когда d qi > 0, а остальные обобщенные координаты неизменны.
При определении надо учитывать указания к определению обобщенных сил по формуле (1.3).
Обобщенные силы системы с двумя степенями свободы рекомендуется определять в следующем порядке.
· Показать на расчетной схеме все активные силы системы.
· Определить первую обобщенную силу Q1. Для этого дать системе первое возможное перемещение, когда d q1 > 0, а d q2 = 0; показать на расчетной схеме соответствующие d q1 возможные перемещения всех тел и точек системы; составить  – выражение элементарной работы сил системы на первом возможном перемещении; возможные перемещения в выразить через d q1; найти Q1 по формуле (1.4), принимая i = 1.
– выражение элементарной работы сил системы на первом возможном перемещении; возможные перемещения в выразить через d q1; найти Q1 по формуле (1.4), принимая i = 1.
· Определить вторую обобщенную силу Q2. Для этого дать системе второе возможное перемещение, когда d q2 > 0, а d q1 = 0; показать на расчетной схеме соответствующие d q2 возможные перемещения всех тел и точек системы; составить  – выражение элементарной работы сил системы на втором возможном перемещении; возможные перемещения в выразить через d q2; найти Q2 по формуле (1.4), принимая i = 2.
– выражение элементарной работы сил системы на втором возможном перемещении; возможные перемещения в выразить через d q2; найти Q2 по формуле (1.4), принимая i = 2.
Пример 1.5 (см. условие к рис. 1.2)
Определим Q1 и Q2, соответствующие обобщенным координатам xD и xA (рис. 1.6, а).
На систему действуют три активные силы: PA = 2P, PB = PD =P.
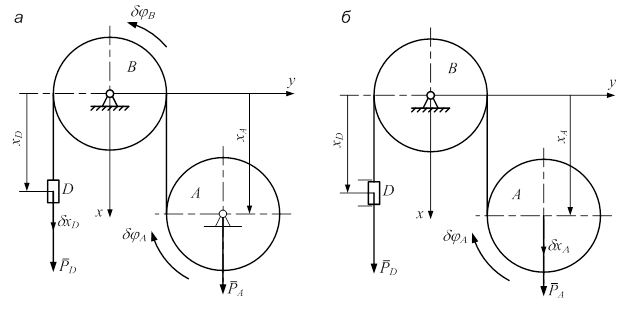
Рис. 1.6
Определение Q1. Дадим системе первое возможное перемещение, когда d xD > 0, d xA = 0 (рис. 1.6, а). При этом груз D переместится по вертикали вниз на расстояние d xD, блок B повернется против часовой стрелки на угол dj B, ось цилиндра A останется неподвижной, цилиндр A повернется вокруг оси A на угол dj A по часовой стрелке. Составим сумму работ на указанных перемещениях:
 ;
;
определим
 . (в)
. (в)
Определим Q2. Дадим системе второе возможное перемещение, когда d xD = 0, d xA > 0 (рис. 1.6, б). При этом ось цилиндра A переместится по вертикали вниз на расстояние d xA, цилиндр A повернется вокруг оси A по часовой стрелке на угол dj A, блок B и груз D останутся неподвижными. Составим сумму работ на указанных перемещениях:
 ;
;
определим
 . (г)
. (г)
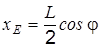
Пример 1.6 (см. условие к рис. 1.3)
Определим Q1 и Q2, соответствующие обобщенным координатам j, s (рис. 1.7, а). На систему действуют четыре активные силы: вес стержня P, вес шарика  , силы упругости пружины
, силы упругости пружины  и
и  .
.
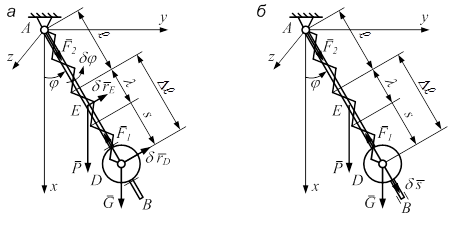
Рис. 1.7
Учтем, что  . Модуль сил упругости определяется по формуле (а).
. Модуль сил упругости определяется по формуле (а).
Отметим, что точка приложения силы F2 неподвижна, поэтому работа этой силы на любом возможном перемещении системы равна нулю, в выражение обобщенных сил сила F2 не войдет.
Определение Q1. Дадим системе первое возможное перемещение, когда dj > 0, d s = 0 (рис. 1.7, а). При этом стержень AB повернется вокруг оси z против часовой стрелки на угол dj, возможные перемещения шарика D и центра E стержня направлены перпендикулярно отрезку AD, длина пружины не изменится. Составим в координатной форме [см. формулу (1.3б)]:
 .
.
(Обратим внимание на то, что  , поэтому работа этой силы на первом возможном перемещении равна нулю).
, поэтому работа этой силы на первом возможном перемещении равна нулю).
Выразим перемещения d xE и d xD через dj. Для этого вначале запишем
 ,
,  .
.
Затем в соответствии с формулой (7) прил. 1 найдем
 ,
,  .
.
Подставляя найденные величины в , получим
 .
.
По формуле (1.4), учитывая, что  , определим
, определим
 . (д)
. (д)
Определение Q2. Дадим системе второе возможное перемещение, когда dj = 0, d s > 0 (рис. 1.7, б). При этом стержень AB останется неподвижным, а шарик M сместится вдоль стержня на расстояние d s. Составим сумму работ на указанных перемещениях:
 ;
;
определим
 ;
;
подставив значение силы F1 из формулы (а), получим
 . (е)
. (е)
1.5. Выражение кинетической энергии системы
в обобщенных координатах
Кинетическая энергия системы равна сумме кинетических энергий ее тел и точек (прил. 2). Чтобы получить для T выражение (1.2), следует скорости всех тел и точек системы выразить через обобщенные скорости, используя методы кинематики [2]. При этом система считается находящейся в произвольном положении, все ее обобщенные скорости считаются положительными, т. е. направленными в сторону возрастания обобщенных координат.
Пример 1. 7 (см. условие к рис. 1.1)
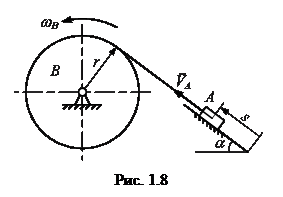 Определим кинетическую энергию системы (рис. 1.8), взяв в качестве обобщенной координаты расстояние s,
Определим кинетическую энергию системы (рис. 1.8), взяв в качестве обобщенной координаты расстояние s,
T = TA + TB.
По формулам (2) и (3) прил. 2 имеем:  .
.
Далее выразим VA и w B через  :
:  .
.
Подставляя эти данные в T и учитывая, что  , получим
, получим
 . (ж)
. (ж)
Пример 1.8 (см. условие к рис. 1.2)
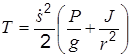
 Определим кинетическую энергию системы на рис. 1.9, взяв в качестве обобщенных координат величины xD и xA,
Определим кинетическую энергию системы на рис. 1.9, взяв в качестве обобщенных координат величины xD и xA,
T = TA + TB + TD.
По формулам (2), (3), (4) прил. 2 запишем

 .
.
Выразим VA, VD, wB и w A через  :
:

 .
.
При определении w A учтено, что точка O (рис. 1.9) – мгновенный центр скоростей цилиндра A и Vk = VD (см. соответствующие пояснения к примеру 2 прил. 2).
Подставляя полученные результаты в T и учитывая, что
 ,
,
определим
 . (и)
. (и)
 Пример 1.9 (см. условие к рис. 1.3)
Пример 1.9 (см. условие к рис. 1.3)
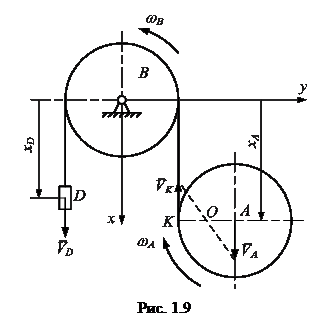
Определим кинетическую энергию системы на рис. 1.10, взяв в качестве обобщенных координат j и s,
T = TAB + TD.
По формулам (1) и (3) прил. 2 имеем
Выразим w AB и VD через  и :
и :
 ,
,
где  – переносная скорость шарика D, ее модуль определяется формулой
– переносная скорость шарика D, ее модуль определяется формулой
 ,
,
направлена перпендикулярно отрезку AD в сторону возрастания угла j;  – относительная скорость шарика, ее модуль определяется по формуле
– относительная скорость шарика, ее модуль определяется по формуле  , направлена в сторону возрастания координаты s. Заметим, что перпендикулярна , поэтому
, направлена в сторону возрастания координаты s. Заметим, что перпендикулярна , поэтому
 .
.
Подставляя эти результаты в T и учитывая, что
 ,
,
получим
 . (к)
. (к)
1.6. Составление дифференциальных уравнений
движения механических систем
Чтобы получить искомые уравнения, нужно в уравнения Лагранжа (1.1) подставить найденное ранее выражение кинетической энергии системы в обобщенных координатах и обобщенные силы Q 1, Q 2, …, Qn.
При нахождении частных производных T по обобщенным координатам  и по обобщенным скоростям
и по обобщенным скоростям  следует учитывать, что переменные q 1, q 2, …, qn;
следует учитывать, что переменные q 1, q 2, …, qn;  считаются независимыми между собой. Это значит, что определяя частную производную T по одной из этих переменных, все остальные переменные в выражении для Т следует рассматривать как постоянные величины.
считаются независимыми между собой. Это значит, что определяя частную производную T по одной из этих переменных, все остальные переменные в выражении для Т следует рассматривать как постоянные величины.
При выполнении операции  следует дифференцировать по времени все входящие в переменные величины.
следует дифференцировать по времени все входящие в переменные величины.
Подчеркнем, что уравнения Лагранжа  записываются для каждой обобщенной координаты qi (i = 1, 2 ,…n) системы.
записываются для каждой обобщенной координаты qi (i = 1, 2 ,…n) системы.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 2608; Нарушение авторских прав?; Мы поможем в написании вашей работы!