КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение потенциальной энергии системы
|
|
|
|
Потенциальная энергия, как известно, определяется с точностью до постоянного слагаемого. Поэтому потенциальную энергию системы в некотором наперед выбранном положении всегда можно принять равной нулю. Обычно полагают равной нулю потенциальную энергию системы в положении, где все ее обобщенные координаты равны нулю. Это положение системы будем называть начальным положением и обозначать буквой M 0.
Потенциальная энергия консервативной системы в ее произвольном положении M равна работе действующих на систему сил при перемещении системы из этого произвольного положения M в начальное положение M 0, то есть
 . (2.2)
. (2.2)
Основные приемы вычисления работы постоянной силы тяжести и упругой силы указаны в прил. 3.
Потенциальная энергия П системы, определяемая по формуле (2.2), зависит только от положения системы, то есть от ее обобщенных координат  . Поэтому П всегда может быть представлена в форме
. Поэтому П всегда может быть представлена в форме
 . (2 3)
. (2 3)
Для этого достаточно все перемещения, входящие в  , выразить через изменения обобщенных координат, используя геометрические соотношения расчетной схемы.
, выразить через изменения обобщенных координат, используя геометрические соотношения расчетной схемы.
Определение потенциальной энергии для консервативной системы рекомендуется производить в такой последовательности:
· изобразить систему в произвольном положении M, определяемом координатами  , производя отсчет координат от начального положения M 0 системы;
, производя отсчет координат от начального положения M 0 системы;
· показать все действующие на систему активные силы;
·  отметить перемещение точек приложения сил при переходе системы из положения M 0 в положение M;
отметить перемещение точек приложения сил при переходе системы из положения M 0 в положение M;
· записать , пользуясь формулами прил. 3;
· выразить все перемещения в через изменения обобщенных координат системы и по формуле (2.2) определить потенциальную энергию системы.
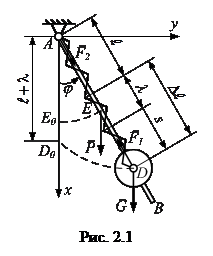
Определим потенциальную энергию системы на рис. 1.3, взяв за обобщенные координаты величины j и s (рис. 2.1).
Начальное положение системы M 0 возьмем в положении ее статического равновесия, когда j = 0, s = 0; деформация пружины в этом положении системы равна l. В произвольном положении M системы j > 0, s > 0.
Активные силы системы:  ; сила упругости
; сила упругости  (cм. подразд. 1.3).
(cм. подразд. 1.3).
При перемещении системы из M 0 в M точка приложения сил  и
и  переместится из положения D 0 в положение D. Точка приложения силы P переместится из положения E 0 в положение E. Точка A приложения силы F 2 – неподвижна.
переместится из положения D 0 в положение D. Точка приложения силы P переместится из положения E 0 в положение E. Точка A приложения силы F 2 – неподвижна.
Определим работу сил при перемещении системы из M 0 в M:
 ;
;
где
 ,
,  ,
,  .
.
Учитывая, что  , по формуле (2.2) определим
, по формуле (2.2) определим
 .
.
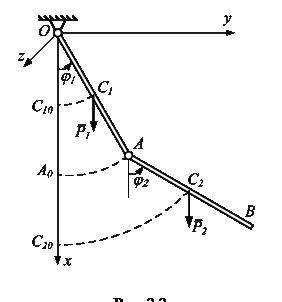
Далее определим потенциальную энергию двойного физического маятника из двух шарнирно связанных стержней ОА и АВ (рис. 2.2) весом Р и длиной  каждый. Стержень ОА вращается вокруг горизонтальной оси z, а стержень АВ совершает плоскопараллельное движение в вертикальной плоскости xy.
каждый. Стержень ОА вращается вокруг горизонтальной оси z, а стержень АВ совершает плоскопараллельное движение в вертикальной плоскости xy.
Система на рис. 2.2 имеет две степени свободы (см. подразд. 1.2). В качестве обобщенных координат возьмем углы j1 и j2 – отклонения стержней в произвольном положении М системы от направления оси x. В начальном положении М 0 системы j1 = 0 и j2 = 0.
Активными силами системы являются силы тяжести стержней Р 1 и Р 2. При переходе системы из положения Мо в положение М точки приложения сил Р 1 и Р 2 опишут криволинейные траектории С 10 С 1 и С 20 С 2 соответственно. Определим сумму работ сил Р 1 и Р 2 при перемещении системы из М в М 0
 .
.
Затем по формуле (2.2) имеем
 .
.
2.4. Составление дифференциальных уравнений
движения консервативных систем
Чтобы получить искомые уравнения для консервативной системы, нужно вначале записать функцию Лагранжа L = T – П, затем подставить L в уравнения (2.1). При дифференцировании функции L следует принять во внимание все замечания, относящиеся к дифференцированию функций T в подразд. 1.6.
Далее предлагается самостоятельно сформировать функцию Лагранжа L для системы на рис. 2.1, подставить эту функцию в уравнение Лагранжа (2.1) и убедиться, что полученные этим способом дифференциальные уравнения движения совпадают с уравнениями для той же системы из подразд. 1.6 (пример 1.12).
При решении задач в некоторых случаях может получиться, что одна какая-либо обобщенная координата qi системы не входит явно в функцию Лагранжа L. Тогда будем иметь  . Соответствующее этой координате уравнение Лагранжа в (2.1) имеет вид
. Соответствующее этой координате уравнение Лагранжа в (2.1) имеет вид
 .
.
Из этого следует, что
 . (2.4)
. (2.4)
Выражение (2.4) называют циклическим интегралом, а координату qi – циклической координатой. Наличие циклического интеграла существенно упрощает решение задачи.
2.5. Методика решения задач с помощью уравнений
Лагранжа для консервативных систем
· Проверить, действительно ли консервативна рассматриваемая система (подразд. 2.2).
· Определить число степеней свободы системы и выбрать ее обобщенные координаты (подразд. 1.2 и 1.3).
· Записать выражение кинетической энергии системы в обобщенных координатах (подразд. 1.5).
· Составить выражение потенциальной энергии системы (подразд. 2.3).
· Составить дифференциальные уравнения движения системы (подразд. 2.4).
· Решая полученную систему дифференциальных уравнений, определить искомые величины.
При решении задач надо учитывать замечания, сделанные в подразд. 1.1.
Задача 2.1. Система на рис. 2.3 состоит из призмы A весом 2 P и соединенного с ней шарниром тонкого однородного стержня AB весом P и длиной . При движении системы стержень колеблется в вертикальной плоскости, призма A движется вдоль оси x. Пренебрегая сопротивлением движению, составить дифференциальные уравнения движения этой системы и затем найти зависимость между скоростью призмы и угловой скоростью стержня, если в начальный момент  .
.
Активные силы – силы тяжести призмы и стержня. Поэтому согласно подразд. 2.2 система консервативна.
Система на рис. 2.3 имеет две степени свободы, так как для ее остановки нужно закрепить сначала призму, движущуюся прямолинейно, а затем стержень, вращающийся вокруг оси A.
Положение статического равновесия системы обозначим M 0, в этом положении стержень вертикален (рис. 2.4).
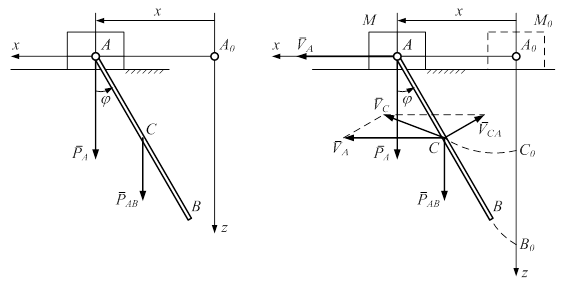
Рис. 2.3 Рис. 2.4
В качестве обобщенных координат возьмем величины x и j. Эти координаты в положении M 0 равны нулю.
Определим кинетическую энергию системы T = TA + TAB.
По формулам (2) и (4) прил. 2

Выразим VA, w AB и VC через обобщенные скорости  и
и  : из анализа рис. 2.4 следует, что
: из анализа рис. 2.4 следует, что  , где
, где  ; далее по формуле, определяющей диагональ параллелограмма, находим
; далее по формуле, определяющей диагональ параллелограмма, находим
 .
.
Подставляя эти результаты в T и учитывая, что
 ,
,
получим
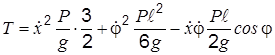 .
.
Определим потенциальную энергию системы на рис. 2.4. Для этого вычислим работу сил на перемещении системы из положения M в положение M 0:
 .
.
Далее согласно формуле (2.2) имеем
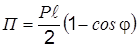 .
.
Для составления дифференциальных уравнений движения системы вначале найдем функцию Лагранжа
 .
.
Обобщенная координата x не входит явно в L: она является циклической. Ей соответствует циклический интеграл (2.4):  или
или
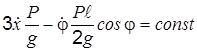 . (а)
. (а)
Это первое дифференциальное уравнение движения рассматриваемой системы. Из уравнения (а) при начальных условиях t = 0  ,
,  получим
получим
 .
.
Это искомая зависимость между скоростью призмы и угловой скоростью стержня.
Для получения второго дифференциального уравнения движения системы найдем

Подставляя эти результаты в (2.1), получим
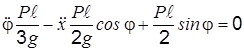 . (б)
. (б)
 Уравнения (а) и (б) являются искомыми дифференциальными уравнениями движения рассматриваемой системы.
Уравнения (а) и (б) являются искомыми дифференциальными уравнениями движения рассматриваемой системы.
Далее предлагается самостоятельно решить задачи 2.2 и 2.3.
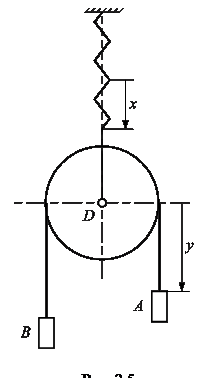
Задача 2.2. Блок D подвешен к нижнему концу вертикальной пружины, верхний конец которой неподвижен (рис. 2.5). Коэффициент жесткости пружины равен с. Через блок перекинута нерастяжимая нить с грузами А и В на концах, массы грузов соответственно равны m 1 и m 2. Выбирая за обобщенные координаты удлинение x пружины из положения статического равновесия и расстояние y груза А от оси блока, составить дифференциальные уравнения движения данной системы. Массой нити и блока пренебречь.
Ответ: 

Задача 2.3. Составить дифференциальные уравнения движения системы на рис. 2.2, учитывая условия задачи, соответствующие этому рисунку (см. подразд. 2.3). Сопротивлением движению системы пренебречь. В качестве обобщенных координат взять углы j1 и j2.
Ответ: 

*) Связи системы называются голономными, если их уравнения могут быть записаны в виде, не содержащем производные от координат по времени или дифференциалов координат.
**) Связи системы называются стационарными, если ограничения, накладываемые ими на положение тел и точек системы, не изменяются при движении.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1084; Нарушение авторских прав?; Мы поможем в написании вашей работы!