КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие о передаточной функции
|
|
|
|
Динамика систем регулирования
Под динамикой регулирования понимают исследования с целью решения двух задач:
1. Задача анализа САУ – изучения законов изменения регулируемых величин под воздействием различных возмущений при различных сочетаниях параметров САУ.
2. Задача синтеза САУ – определения структуры и параметров САУ, обеспечивающих заранее заданное качество переходных процессов.
Исходными данными для исследования динамики САУ являются дифференциальные уравнения и структурные схемы, составленные для отдельных элементов САУ на основе тех физических законов, которые определяют процессы в этих элементах. Совокупность дифференциальных или интегрально-дифференциальных уравнений всех элементов системы образует математическое описание САУ в динамике.
В общем случае уравнение, описывающее поведение САУ, является нелинейным. Однако, если поведение САУ в динамике рассматривается при относительно малых по величине отклонениях переменных, то возможно осуществлять линеаризацию дифференциальных уравнений. Такая линеаризация сводится к линеаризации имеющих место нелинейной статической характеристики и нелинейных функций нескольких переменных (двух).
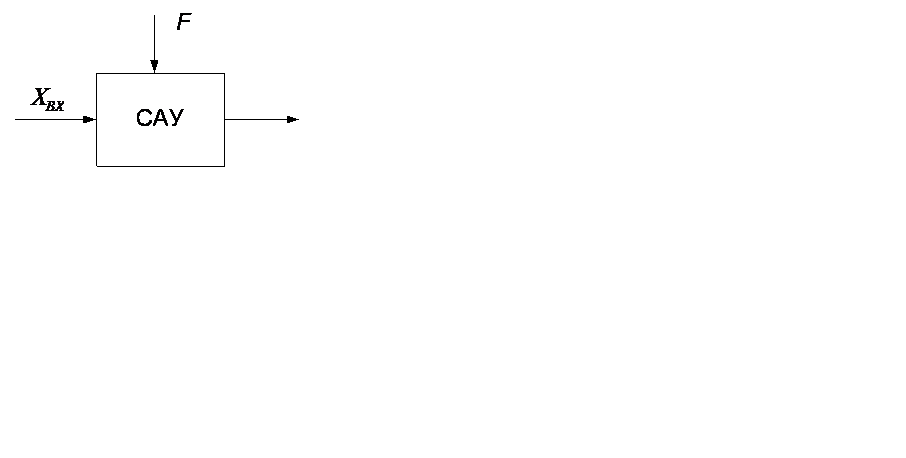
Если решать систему линеаризации дифференциальных уравнений, составленных для каждого элемента САУ относительно какой-либо одной регулируемой величины х(t)=хВЫХ(t) по отношению к отклонению
Рисунок 1.1 – Систем АУ х(t)=хВХ(t) и к возмущающему воздействию
f (t), то в результате получим дифференциальные уравнения с постоянными коэффициентами следующего вида:
 , (1.1)
, (1.1)
где  ;
;  ;
;  - постоянные коэффициенты.
- постоянные коэффициенты.
Уравнение (1.1) носит название общего дифференциального уравнения САУ или уравнения движения САУ.
Применяя к уравнению (1.1) при нулевых начальных условиях преобразование Лапласа, запишем это уравнение в операторной форме:
 , (1.2)
, (1.2)
где XВЫХ(p); ХВХ(p) и F(p) – изображения соответственно функций xВЫХ(t); хВХ(t) и f(t).
Передаточной функцией САУ по задающему воздействию (рисунок 1.2,а) называется отношение операторного изображения выходной величины САУ к операторному изображению входной величины САУ при нулевых начальных условиях, т.е.:
 . (1.3)
. (1.3)
Соответственно, передаточной функцией САУ по возмущающему воздействию (рисунок 1.2,б) называют отношение операторного изображения выходной величины к операторному изображению возмущающего воздействия при нулевых начальных условиях
 . (1.4)
. (1.4)
а) б)
Рисунок 1.2 – Передаточные функции
Т.к. при записи уравнений линейной САУ в операторной форме дифференциальные уравнения становятся алгебраическими, то с ними можно оперировать совершенно так же, как с линейными уравнениями для установившегося режима.
 Обозначим соответственно
Обозначим соответственно
 ;
;  - полиномы n-ой и m-ой степени от р.
- полиномы n-ой и m-ой степени от р.
Тогда передаточная функция по задающему воздействию равна  (1.5)
(1.5)
где Аn(р)=0 – характеристическое уравнение.
Если известны полюсы рi и нули qi функции W(p), соответствующие корням An(p=0) и Bт(p)=0, то выражение (1.5) можно записать как
 . (1.6)
. (1.6)
Предполагается, что полиномы An(p) и Bm(p) не имеют общих корней и дробь (1.6) не может быть сокращена.
Найдём переходную функцию при входном единичном ступенчатом воздействии
хВХ(t)=1(t),тогда ХВХ(р)=  . (1.7)
. (1.7)
Вычислим  (1.8)
(1.8)
Перейдём к оригиналу.
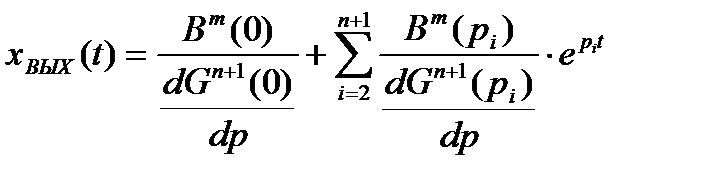 , (1.9)
, (1.9)
где рi – корни уравнения Gn+1(p)=0.
Здесь предполагается, что функция W(p) не имеет кратных полюсов и что n>m.
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 776; Нарушение авторских прав?; Мы поможем в написании вашей работы!