КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические характеристики производственных механизмов и электрических двигателей
|
|
|
|
Определение приведенного момента инерции электропривода.
В отличие от определения статического момента, для приведения динамического момента необходимо знать параметры механической передачи и тип передачи. Принцип приведения основан на том, что величина суммарного запаса кинетической энергии всех движущихся частей электропривода, приведенных к валу двигателя, остается неизменной.
J(ω2/2) = Jд(ω2/2) + J5(ω2/2) + J6(ωб2/2) + Jб(ωб2/2) + m(v2/2)
J(ω2/2) = (Jд + J5)(ω2/2) + (J6 + Jб)(ωб2/2) + m(v2/2)
Jд + J5 = J1
J6 + Jб = J2
J1 – момент инерции всех элементов привода, вращающихся со скоростью ω.
J2 – момент инерции всех частей привода, совершающих вращательное движение со скоростью ωб.
J(ω2/2) = J1(ω2/2) + J2(ωб2/2) + m(v2/2)
J = J1 + J2(ωб/ω)2 + m(v/ω)2
J = J1 + J2/i2 + mρ2
Для приведения суммарного момента инерции к валу двигателя нужно знать моменты инерции всех вращающихся элементов электрического привода и отношение скоростей между скоростью вращения двигателя и скоростью вращения элемента привода. Если они вращаются с разными скоростями, то момент инерции нужно разделить на передаточное число в квадрате, а момент инерции от массы всех частей электропривода, совершающих поступательное движение, для приведения умножить на квадрат радиуса приведения.
Вопрос4
При выборе электрического двигателя, приводящего в действие производственный механизм, необходимо соответствие механических свойств характеристикам производственного механизма.
Каждый производственный механизм в зависимости от технологического процесса имеет свою механическую характеристику. Механической характеристикой производственного механизма называется зависимость скорости вращения ωс от момента сопротивления производственного механизма Mс. Так как производственные механизмы обладают большим разнообразием характеристик. Чтобы как-то их классифицировать, используется эмпирическая формула:
Mс = M0 + (Mвр – Mсн)(ω/ωн)x
Mс – момент сопротивления производственного механизма при скорости ω.
M0 – момент трения в движущихся частях производственного механизма.
Mсн – момент сопротивления при номинальной скорости вращения ωн.
x – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
1. При x=0 момент сопротивления не зависит от скорости вращения ω и механическая характеристика будет представлять собой прямую линию, параллельную оси скорости.
2. x=1 – линейно возрастающая характеристика. с увеличением сопротивления увеличивается и скорость вращения производственного механизма.
3. x=2 – характеристика не линейно возрастающая. Момент сопротивления будет зависеть от квадрата скорости.
4. x=-1 – характеристика нелинейно убывающая. Момент сопротивления Mс обратно пропорционален скорости, но при этом мощность будет оставаться постоянной.
Характеристика первого типа относится к таким производственным механизмам, как поршневые насосы, механизмы подачи станков, электрические приводы конвейеров.
Характеристики второго типа обычно бывают у механизмов подъема кранов.
Характеристиками третьего типа обладают вентиляторы, центробежные насосы, компрессоры.
Характеристику четвертого типа имеют приводы шпинделей и планшайб.
Электрические двигатели делятся на различные виды по жесткости характеристик:
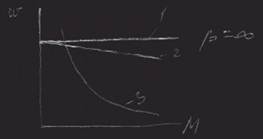
1. Абсолютно жесткая характеристика, у которой скорость вращения не зависит от нагрузки.
Жесткостью называется отношение приращения момента к приращению скорости.
β = ΔM / Δω
2. Жесткая характеристика. Наклон этой характеристики относительно максимальной скорости зависит от параметров двигателя.
Характеристику этого типа имеет двигатель постоянного тока (ДПТ) и асинхронный двигатель на рабочей части механической характеристики.
3. Мягкая характеристика. Данная механическая характеристика отличается резким снижением скорости при увеличении нагрузки.
Характеристика этого типа будет у двигателей постоянного тока независимого и смешанного возбуждения.
Вопрос 5
Механические характеристики электродвигателей
Механические характеристики электродвигателей могут быть естественными и искусственными. Естественные механические характеристики - это зависимость вида n=f(MB) при нормальных условиях работы электродвигателя, когда значения напряжения, тока и частоты вращения равны номинальным. Номинальный режим - это режим работы, для которого предназначен данный электродвигатель.
Механические характеристики электродвигателей могут быть естественными и искусственными.
- Естественные механические характеристики - это зависимость вида n=f(MB) при нормальных условиях работы электродвигателя, когда значения напряжения, тока и частоты вращения равны номинальным.
- Искусственные механические характеристики - это зависимость вида n=f(MB) для случаев, когда напряжение, подведенное к электродвигателю, отличается от номинального или когда в цепь якоря (ротора) включено дополнительное сопротивление.
Номинальный режим - это режим работы, для которого предназначен данный электродвигатель. Основные данные такого режима указаны в паспорте электродвигателя.
Номинальная мощность - это полезная механическая мощность на валу электродвигателя при номинальных значениях напряжения, тока и частоты вращения.
Номинальный вращающий момент - это момент на валу электродвигателя при номинальных значениях мощности и частоты вращения.
Номинальная частота вращения - это скорость на валу двигателя при номинальных значениях напряжения и мощности.
Номинальный к.п.д. -это к.п.д. электродвигателя при номинальном режиме.
Начальный пусковой вращающий момент - это момент вращения, развиваемый электродвигателем при неподвижном роторе, номинальных напряжении и частоте и обмотках, соединенных соответственно номинальному режиму
Максимальный вращающий момент - это наибольший вращающий момент, развиваемый электродвигателем при номинальных напряжении, частоте и обмотках, соединенных соответственно номинальному режиму.
Вопрос 6
Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
U я=E я+I я)(R я+R д), (5.35)
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 972; Нарушение авторских прав?; Мы поможем в написании вашей работы!