КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механическая и угловая характеристики синхронных электродвигателей
|
|
|
|
Синхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим.
Механическая и угловая характеристики синхронного двигателя
а — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.
Вопрос15
Пуск синхронного двигателя
Известно, что синхронный двигатель не способен запуститься самостоятельно даже при полном отсутствии нагрузки на валу. Причина состоит в том, что направление вращающего момента двигателя в любой случайный момент времени зависит от взаимной направленности векторов напряженности электромагнитных полей ротора и статора. Поскольку статор синхронного двигателя создает вращающееся поле, а магнитное поле ротора создается постоянным током и неподвижно, то и вектор электромагнитного момента двигателя непрерывно меняет свое направление на противоположное. Происходит это с частотой изменения напряжения сети, равной в наиболее общем случае 50 герцам. Разумеется, что ротор при этом не может прийти во вращение, так как для разгона ему требуется как минимум несколько секунд.
Развить какую-то полезную мощность на рабочем валу синхронный двигатель может только тогда, когда ротор уже вращается со скоростью, сколько-нибудь близкой к синхронной. Поэтому для запуска синхронный привод необходимо каким-то образом разогнать, а лишь затем подать напряжение на обмотку постоянного тока ротора и на статорную обмотку. При этом магнитное поле роторной обмотки начинает взаимодействовать с полем статора, и двигатель втягивается в «синхронизм».
Подачу постоянного напряжения на роторную обмотку можно обеспечить при помощи аккумуляторной батареи или генератора, устанавливаемого на вал двигателя. Проблема предварительного разгона ротора долгое время решалась только при помощи дополнительной электрической машины – разгонного асинхронного двигателя, включавшегося только на время пуска привода.
Но более популярным на сегодняшний день является пуск синхронного двигателя с помощью дополнительной короткозамкнутой обмотки ротора. При этом синхронный двигатель запускается как асинхронный. Пусковая обмотка синхронного двигателя часто выполняется из латуни, а не из меди, чтобы снизить потребляемый двигателем ток при асинхронном пуске.
На время асинхронного пуска синхронного привода роторная обмотка постоянного тока двигателя должна быть замкнута на активное сопротивление, превышающее собственное сопротивление обмотки в 8-12 раз. Это требование связано с тем, что при пуске в этой обмотке наводится повышенная ЭДС, которая может вызвать пробой изоляции витков, не будучи разряженной. Иногда из этих же соображений роторную обмотку синхронного двигателя на время пуска замыкают на якорь генератора, если расчеты подтверждают способность последнего выдержать повышенную пусковую нагрузку.
В любом случае запуск синхронного привода является технически сложной задачей. Требуется установка дополнительных электрических машин и монтаж электрооборудования, контролирующего и согласовывающего подачу напряжения на обмотки приводного двигателя.
Из-за осложненного пуска сфера применения синхронных приводов очень ограничена. Обыкновенно синхронные двигатели применяются в мощных электромеханических установках, длительно работающих при постоянной нагрузке без остановов и пусков. Это может быть, например, привод электромашинного преобразовательного агрегата, привод мощной насосной или вентиляционной установки. Несомненным достоинством синхронного двигателя в таких приводах является возможность регулирования коэффициента мощности для обеспечения высоких энергетических показателей.
Вопрос16
1. Торможение противовключением может быть реализовано так же как у АД при помощи изменения последовательности чередования фаз напряжения, подводимого к статору, но, учитывая, что синхронные двигатели используются в ЭП большой и сверхбольшой мощности, этот способ торможения практически не применяется, так как приводит к перегреву двигателя и к преждевременному разрушению механизма. Область применения режима противовключения в СД ограничивается реверсом, при этом реверс реализуется, начиная с момента асинхронного запуска.
2. Рекуперативное торможение в синхронном ЭП может быть реализован только в том случае, если к ротору приложить со стороны некого вспомогательного источника (активного) механической энергии дополнительный момент, направленный в сторону вращения. Под действием этого момента скорость  ротора станет больше синхронной скорости. Изменяется знак
ротора станет больше синхронной скорости. Изменяется знак  , рабочая точка
, рабочая точка  перейдет из 1-ого квадрата в 3-ий (на угловой характеристике). Знак момента изменится на противоположный, и по отношению к направлению угловой скорости момент станет тормозным. Под действием тормозного момента
перейдет из 1-ого квадрата в 3-ий (на угловой характеристике). Знак момента изменится на противоположный, и по отношению к направлению угловой скорости момент станет тормозным. Под действием тормозного момента  , скорость вновь снизиться до
, скорость вновь снизиться до  . Очевидно, что для практической реализации снижения угловой скорости меньше этот способ торможения неприменим.
. Очевидно, что для практической реализации снижения угловой скорости меньше этот способ торможения неприменим.
Учитывая выше сказанное, единственный практически применимый способ торможения - динамическое торможение.
Механическая характеристика СД при рекуперативном торможении
Характеристика СД при рекуперативном торможении ( )
)
3. Динамическое торможение. Статорная обмотка отключается от источника 3-х фазного переменного напряжения и замыкается на тормозное сопротивление. Обмотка возбуждения ротора остаётся подключенной к источнику постоянного напряжения.
При этом, взаимодействие статического магнитного поля с токами во вращающемся роторе создаёт, в соответствии с правилом Ленца, момент направленный противоположно направлению вращающегося вала, т.е. тормозной. Механические характеристики аналогичны механическим характеристикам АД.
Интенсивность торможения определяется величиной  . Чем меньше , тем торможение интенсивнее.
. Чем меньше , тем торможение интенсивнее.
Вопрос17
Регулирование скорости электропривода применяют в установках с переменной нагрузкой для изменения производительности холодильных компрессоров.
Регулирование скорости электропривода осуществляется одновременным изменением частоты и напряжения, подводимого к ротору МДП. Предполагается, что статический преобразователь частоты безынерционен, и заданные частота и напряжение, связанные определенным законом, устанавливаются мгновенно.
Регулирование скорости электропривода обеспечивается воздействием на параметры электрических цепей или источников питания. Для оценки свойств регулируемого электропривода вводится ряд показателей.
Регулированием скорости электропривода называется принудительное изменение скорости вращения в зависимости от требований производственного процесса.
Для регулирования скорости электроприводов наиболее целесообразным является использование цифроаналоговых систем регулирования.
Под регулированием скорости электроприводов понимается в общем случае принудительное, целенаправленное ее изменение. Понятие регулирования скорости не следует смешивать с изменениями скорости, возникающими при колебаниях нагрузки на валу двигателя, а также при колебаниях напряжения или частоты питающей сети.
Цифровые системы регулирования скорости электроприводов нашли широкое применение в ряде областей промышленности: металлургической (черная и цветная) - регулирование скорости прокатки, транспортные линии, агрегаты резки и др.; бумажной - регулирование скорости электроприводов бумагоделательных машин; энергетической - регулирование частоты, авиационной, автомобильной и машиностроительной - программное управление и регулирование скорости при испытании агрегатов и узлов машин.
Важным показателем качества регулирования скорости электроприводов служит плавность регулирования.
Дальнейшее развитие принципов регулирования скорости электроприводов, заложенных в каскаде асинхронный двигатель - одноякорный преобразователь, пошло по пути создания каскадов без одноякорного преобразователя, взамен которого используется агрегат, состоящий из синхронной машины и машины постоянного тока. Такая замена позволяет выполнить систему регулирования на мощности приводного двигателя, достигающие нескольких десятков тысяч киловатт.
Построение цифроаналоговых систем регулирования скорости электропривода по принципу подчиненного регулирования параметров позволяет использовать все преимущества подобных аналоговых систем, а также унифицировать цифровые узлы этих систем.
Вопрос 18
| Регулирование скорости двигателей постоянного тока
|
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря. Схема включения двигателя для этого случая представлена на рис. 1, а электромеханические и механические характеристики — на рис. 2, а. Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря. Схема включения двигателя для этого случая представлена на рис. 1, а электромеханические и механические характеристики — на рис. 2, а.
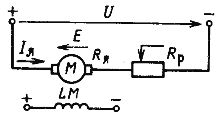 Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
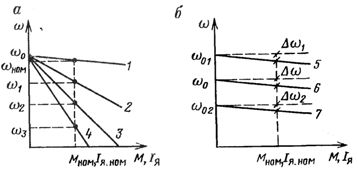 Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D=2 - З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D=2 - З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Вопрос 20 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Вопрос 20
|
 В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
На рис. 1 представлена схема регулируемого электропривода по системе генератор — двигатель (сокращенно Г — Д). В этой системе асинхронный двигатель АД непрерывно вращает генератор Г постоянного тока с независимым возбуждением и возбудитель В, представляющий собой маломощный генератор постоянного тока с параллельным возбуждением.
Двигатель постоянного тока Д приводит в движение рабочий орган станка. Обмотки возбуждения ОВГ генератора и ОВД двигателя питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение, подводимое к якорю двигателя Д, и тем самым регулируют частоту вращения двигателя. Двигатель при этом работает с полным и неизменным потоком, так как реостат 2 выведен.
При изменении напряжения U меняется частота вращения n0 идеального холостого хода двигателя Д. Так как поток двигателя и сопротивление цепи его якоря не меняются, то угловой коэффициент b остается постоянным. Поэтому прямолинейные механические характеристики, соответствующие разным значениям U, расположены одна под другой и параллельны друг другу (рис. 2).
В различных станках часто требуется бесступенчатое регулирование частоты вращения привода в пределах более широких, чем те, которые может обеспечить регулирование посредством изменения магнитного потока двигателя постоянного тока с параллельным возбуждением. В этих случаях применяют более сложные системы электропривода.
На рис. 1 представлена схема регулируемого электропривода по системе генератор — двигатель (сокращенно Г — Д). В этой системе асинхронный двигатель АД непрерывно вращает генератор Г постоянного тока с независимым возбуждением и возбудитель В, представляющий собой маломощный генератор постоянного тока с параллельным возбуждением.
Двигатель постоянного тока Д приводит в движение рабочий орган станка. Обмотки возбуждения ОВГ генератора и ОВД двигателя питаются от возбудителя В. Изменяя реостатом 1 сопротивление цепи возбуждения генератора Г, меняют напряжение, подводимое к якорю двигателя Д, и тем самым регулируют частоту вращения двигателя. Двигатель при этом работает с полным и неизменным потоком, так как реостат 2 выведен.
При изменении напряжения U меняется частота вращения n0 идеального холостого хода двигателя Д. Так как поток двигателя и сопротивление цепи его якоря не меняются, то угловой коэффициент b остается постоянным. Поэтому прямолинейные механические характеристики, соответствующие разным значениям U, расположены одна под другой и параллельны друг другу (рис. 2).
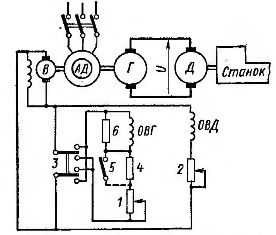 Рис. 1. Система генератор - двигатель постоянного тока (дпт)
Рис. 1. Система генератор - двигатель постоянного тока (дпт)
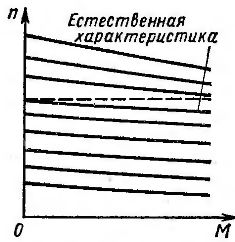 Рис. 2. Механические характеристики системы генератор - двигатель постоянного тока
Они имеют больший наклон, чем характеристики такого же электродвигателя, питаемого от сети постоянного тока, так как в системе Г — Д напряжение U при неизменном токе возбуждения генератора с увеличением нагрузки снижается согласно зависимости:
Рис. 2. Механические характеристики системы генератор - двигатель постоянного тока
Они имеют больший наклон, чем характеристики такого же электродвигателя, питаемого от сети постоянного тока, так как в системе Г — Д напряжение U при неизменном токе возбуждения генератора с увеличением нагрузки снижается согласно зависимости:
 где Ег и rг— соответственно э. д. с. и внутреннее сопротивление генератора.
По аналогии с асинхронными двигателями обозначим
где Ег и rг— соответственно э. д. с. и внутреннее сопротивление генератора.
По аналогии с асинхронными двигателями обозначим
 Эта величина характеризует уменьшение частоты вращения двигателя при повышении нагрузки от нуля до номинальной. Для параллельных механических характеристик
Эта величина характеризует уменьшение частоты вращения двигателя при повышении нагрузки от нуля до номинальной. Для параллельных механических характеристик
 Эта величина возрастает по мере уменьшения n0. При больших значениях sн заданные режимы резания будут значительно изменяться при случайных колебаниях нагрузки. Поэтому диапазон регулирования напряжением обычно не превышает 5:1.
С уменьшением номинальной мощности двигателей падение напряжения в них увеличивается, и механические характеристики получают больший наклон. По этой причине снижают диапазон регулирования напряжением системы Г — Д по мере уменьшения мощности (при мощностях менее 1 кВт до 3:1 или 2:1).
С уменьшением магнитного потока генератора на его напряжении в большей степени сказывается размагничивающее действие реакции его якоря. Поэтому характеристики, относящиеся к низким частотам вращения двигателя, фактически имеют больший наклон, чем механические характеристики.
Расширение диапазона регулирования достигается уменьшением магнитного потока двигателя Д посредством реостата 2 (см. рис. 1), производимым при полном потоке генератора Этому способу регулирования скорости соответствуют характеристики, расположенные выше естественной (см. рис. 2).
Общий диапазон регулирования, равный произведению диапазонов регулирования обоими способами, достигает (10 - 15): 1.Регулирование изменением напряжения является регулированием с постоянным моментом (поскольку магнитный поток двигателя остается неизменным). Регулирование изменением магнитного потока двигателя Д является регулированием с постоянной мощностью.
Перед пуском двигателя Д реостат 2 (см. рис. 1) полностью выводят, и поток двигателя достигает наибольшего значения. Затем реостатом 1 увеличивают возбуждение генератора Г. Это вызывает повышение напряжения, и скорость двигателя Д увеличивается. Если обмотку ОВГ включить сразу на полное напряжение UB возбудителя В, то ток в ней, как во всякой цепи, обладающей индуктивностью и активным сопротивлением, будет нарастать:
Эта величина возрастает по мере уменьшения n0. При больших значениях sн заданные режимы резания будут значительно изменяться при случайных колебаниях нагрузки. Поэтому диапазон регулирования напряжением обычно не превышает 5:1.
С уменьшением номинальной мощности двигателей падение напряжения в них увеличивается, и механические характеристики получают больший наклон. По этой причине снижают диапазон регулирования напряжением системы Г — Д по мере уменьшения мощности (при мощностях менее 1 кВт до 3:1 или 2:1).
С уменьшением магнитного потока генератора на его напряжении в большей степени сказывается размагничивающее действие реакции его якоря. Поэтому характеристики, относящиеся к низким частотам вращения двигателя, фактически имеют больший наклон, чем механические характеристики.
Расширение диапазона регулирования достигается уменьшением магнитного потока двигателя Д посредством реостата 2 (см. рис. 1), производимым при полном потоке генератора Этому способу регулирования скорости соответствуют характеристики, расположенные выше естественной (см. рис. 2).
Общий диапазон регулирования, равный произведению диапазонов регулирования обоими способами, достигает (10 - 15): 1.Регулирование изменением напряжения является регулированием с постоянным моментом (поскольку магнитный поток двигателя остается неизменным). Регулирование изменением магнитного потока двигателя Д является регулированием с постоянной мощностью.
Перед пуском двигателя Д реостат 2 (см. рис. 1) полностью выводят, и поток двигателя достигает наибольшего значения. Затем реостатом 1 увеличивают возбуждение генератора Г. Это вызывает повышение напряжения, и скорость двигателя Д увеличивается. Если обмотку ОВГ включить сразу на полное напряжение UB возбудителя В, то ток в ней, как во всякой цепи, обладающей индуктивностью и активным сопротивлением, будет нарастать:
 где rв — сопротивление обмотки возбуждения, LB — ее индуктивность (влиянием насыщения магнитопровода пренебрегаем).
На рис. 3, а (кривая 1) представлен график зависимости тока возбуждения от времени. Ток возбуждения нарастает постепенно; скорость нарастания определяется соотношением
где rв — сопротивление обмотки возбуждения, LB — ее индуктивность (влиянием насыщения магнитопровода пренебрегаем).
На рис. 3, а (кривая 1) представлен график зависимости тока возбуждения от времени. Ток возбуждения нарастает постепенно; скорость нарастания определяется соотношением
 где Тв — электромагнитная постоянная времени обмотки возбуждения генератора; имеет размерность времени.
где Тв — электромагнитная постоянная времени обмотки возбуждения генератора; имеет размерность времени.
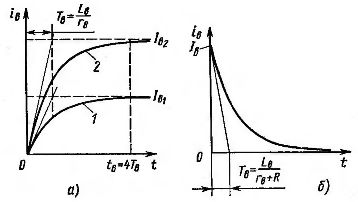 Рис. 3. Изменение тока возбуждения в системе Г—Д
Изменение напряжения генератора при пуске имеет примерно такой же характер, как и изменение силы тока возбуждения. Это дает возможность автоматического прямого пуска двигателя с выведенным реостатом 1 (см. рис. 1).
Нарастание тока возбуждения генератора часто ускоряют (форсируют), прикладывая в начальный момент к обмотке возбуждения напряжение, превышающее номинальное.Процесс нарастания возбуждения будет при этом протекать по кривой 2 (см. рис. 3, а). Когда сила тока в обмотке достигнет величины Iв1 равной установившейся силе тока возбуждения при номинальном напряжении, напряжение на обмотке возбуждения уменьшают до номинального. Время нарастания тока возбуждения до номинального уменьшается.
Для форсирования возбуждения генератора напряжение возбудителя В (см. рис. 1) выбирают в 2—3 раза превышающим номинальное напряжение обмотки возбуждения генератора и вводят в схему добавочный резистор 4. Замыкая на время пуска этот резистор накоротко контактом 5, на обмотку возбуждения подают повышенное напряжение.
Система генератор — двигатель позволяет осуществить торможение с рекуперацией.Для торможения необходимо, чтобы ток в якоре изменил свое направление. Момент при этом также изменит знак и вместо движущего станет тормозным. Торможение возникает при увеличении магнитного потока электродвигателя реостатом 2 или при уменьшении напряжения генератора реостатом 1. В обоих случаях э. д. с. Е двигателя становится выше напряжения U генератора. При этом двигатель Д работает в генераторном режиме и приводится во вращение кинетической энергией движущихся масс, а генератор Г работает в двигательном режиме, вращая со сверхсинхронной скоростью машину АД, которая при этом переходит в режим генератора и отдает энергию в сеть.
Торможение с рекуперацией можно осуществить и без воздействия на реостаты 1 и 2. Можно просто разомкнуть цепь возбуждения генератора (например, переключателем 3). При этом ток в замкнутой цепи, состоящей из обмотки возбуждения генератора и резистора 6, будет постепенно уменьшаться
Рис. 3. Изменение тока возбуждения в системе Г—Д
Изменение напряжения генератора при пуске имеет примерно такой же характер, как и изменение силы тока возбуждения. Это дает возможность автоматического прямого пуска двигателя с выведенным реостатом 1 (см. рис. 1).
Нарастание тока возбуждения генератора часто ускоряют (форсируют), прикладывая в начальный момент к обмотке возбуждения напряжение, превышающее номинальное.Процесс нарастания возбуждения будет при этом протекать по кривой 2 (см. рис. 3, а). Когда сила тока в обмотке достигнет величины Iв1 равной установившейся силе тока возбуждения при номинальном напряжении, напряжение на обмотке возбуждения уменьшают до номинального. Время нарастания тока возбуждения до номинального уменьшается.
Для форсирования возбуждения генератора напряжение возбудителя В (см. рис. 1) выбирают в 2—3 раза превышающим номинальное напряжение обмотки возбуждения генератора и вводят в схему добавочный резистор 4. Замыкая на время пуска этот резистор накоротко контактом 5, на обмотку возбуждения подают повышенное напряжение.
Система генератор — двигатель позволяет осуществить торможение с рекуперацией.Для торможения необходимо, чтобы ток в якоре изменил свое направление. Момент при этом также изменит знак и вместо движущего станет тормозным. Торможение возникает при увеличении магнитного потока электродвигателя реостатом 2 или при уменьшении напряжения генератора реостатом 1. В обоих случаях э. д. с. Е двигателя становится выше напряжения U генератора. При этом двигатель Д работает в генераторном режиме и приводится во вращение кинетической энергией движущихся масс, а генератор Г работает в двигательном режиме, вращая со сверхсинхронной скоростью машину АД, которая при этом переходит в режим генератора и отдает энергию в сеть.
Торможение с рекуперацией можно осуществить и без воздействия на реостаты 1 и 2. Можно просто разомкнуть цепь возбуждения генератора (например, переключателем 3). При этом ток в замкнутой цепи, состоящей из обмотки возбуждения генератора и резистора 6, будет постепенно уменьшаться
 где R — сопротивление резистора 6.
График, соответствующий этому уравнению, приведен на рис. 3, б. Постепенное уменьшение тока возбуждения генератора в данном случае равносильно увеличению сопротивления реостата 1 (см. рис.1) и вызывает рекуперативное торможение. В данной схеме резистор 6, включенный параллельно обмотке возбуждения генератора, является разрядным. Он предохраняет изоляцию обмотки возбуждения от пробоя в случае внезапного аварийного обрыва цепи возбуждения.
При обрыве цепи возбуждения магнитный поток машины резко уменьшается, наводит в витках обмотки возбуждения э. д. с. самоиндукции настолько большую, что она может вызвать пробой изоляции обмотки. Разрядный резистор 6 создает контур, в котором э. д. с. самоиндукции обмотки возбуждения вызывает ток, замедляющий уменьшение магнитного потока.
Падение напряжения на разрядном резисторе равно напряжению на обмотке возбуждения. Чем меньше величина разрядного сопротивления, тем меньше будет напряжение на обмотке возбуждения при разрыве цепи. Вместе с тем при уменьшении величины сопротивления разрядного резистора возрастают непрерывно протекающий по нему в нормальном режиме ток и потери в нем. При выборе величины разрядного сопротивления должны быть учтены оба указанных положения.
После отключения обмотки возбуждения генератора на его зажимах вследствие остаточного магнетизма сохраняется некоторое небольшое напряжение. Оно может вызвать медленное вращение двигателя с так называемой ползучей скоростью. Для устранения этого явления обмотку возбуждения генератора после отключения от возбудителя присоединяют к зажимам генератора так, чтобы напряжение от остаточного магнетизма вызвало в обмотке возбуждения генератора размагничивающий ток.
Для реверса электродвигателя Д меняют направление тока в обмотке возбуждения ОВГ генератора Г посредством переключателя 3 (или иного аналогичного устройства). Вследствие значительной индуктивности обмотки ток возбуждения при этом постепенно уменьшается, меняет направление, а затем постепенно нарастает.
Процессы пуска, торможения и реверса двигателя в рассматриваемой системе отличаются высокой экономичностью, так как их осуществляют без применения реостатов, включенных в цепь якоря.Двигатель пускают и тормозят с помощью легкой и компактной аппаратуры, управляющей лишь небольшими токами возбуждения. Поэтому данную систему "генератор - двигатель постоянного тока" целесообразно использовать для работы с частыми пусками, торможениями и реверсами.
Основными недостатками системы генератор - двигатель постоянного тока являютсяотносительно низкий коэффициент полезного действия, высокая стоимость и громоздкосгь, определяемые наличием в системе большого числа электрических машин. Стоимость системы превышает стоимость одного короткозамкнутого асинхронного двигателя такой же мощности в 8 — 10 раз. Кроме того, такая система электропривода требует много места.
где R — сопротивление резистора 6.
График, соответствующий этому уравнению, приведен на рис. 3, б. Постепенное уменьшение тока возбуждения генератора в данном случае равносильно увеличению сопротивления реостата 1 (см. рис.1) и вызывает рекуперативное торможение. В данной схеме резистор 6, включенный параллельно обмотке возбуждения генератора, является разрядным. Он предохраняет изоляцию обмотки возбуждения от пробоя в случае внезапного аварийного обрыва цепи возбуждения.
При обрыве цепи возбуждения магнитный поток машины резко уменьшается, наводит в витках обмотки возбуждения э. д. с. самоиндукции настолько большую, что она может вызвать пробой изоляции обмотки. Разрядный резистор 6 создает контур, в котором э. д. с. самоиндукции обмотки возбуждения вызывает ток, замедляющий уменьшение магнитного потока.
Падение напряжения на разрядном резисторе равно напряжению на обмотке возбуждения. Чем меньше величина разрядного сопротивления, тем меньше будет напряжение на обмотке возбуждения при разрыве цепи. Вместе с тем при уменьшении величины сопротивления разрядного резистора возрастают непрерывно протекающий по нему в нормальном режиме ток и потери в нем. При выборе величины разрядного сопротивления должны быть учтены оба указанных положения.
После отключения обмотки возбуждения генератора на его зажимах вследствие остаточного магнетизма сохраняется некоторое небольшое напряжение. Оно может вызвать медленное вращение двигателя с так называемой ползучей скоростью. Для устранения этого явления обмотку возбуждения генератора после отключения от возбудителя присоединяют к зажимам генератора так, чтобы напряжение от остаточного магнетизма вызвало в обмотке возбуждения генератора размагничивающий ток.
Для реверса электродвигателя Д меняют направление тока в обмотке возбуждения ОВГ генератора Г посредством переключателя 3 (или иного аналогичного устройства). Вследствие значительной индуктивности обмотки ток возбуждения при этом постепенно уменьшается, меняет направление, а затем постепенно нарастает.
Процессы пуска, торможения и реверса двигателя в рассматриваемой системе отличаются высокой экономичностью, так как их осуществляют без применения реостатов, включенных в цепь якоря.Двигатель пускают и тормозят с помощью легкой и компактной аппаратуры, управляющей лишь небольшими токами возбуждения. Поэтому данную систему "генератор - двигатель постоянного тока" целесообразно использовать для работы с частыми пусками, торможениями и реверсами.
Основными недостатками системы генератор - двигатель постоянного тока являютсяотносительно низкий коэффициент полезного действия, высокая стоимость и громоздкосгь, определяемые наличием в системе большого числа электрических машин. Стоимость системы превышает стоимость одного короткозамкнутого асинхронного двигателя такой же мощности в 8 — 10 раз. Кроме того, такая система электропривода требует много места.
Вопрос 21
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 3433; Нарушение авторских прав?; Мы поможем в написании вашей работы!