КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Примеры расчетов
|
|
|
|
Пример 1. Выполнить кинематический расчет привода по приведенной схеме и исходным данным (рис. 2).
Общие замечания к расчету
1 Вращающий момент от электродвигателя передается входному валу редуктора через ременную передачу, ведущий шкив которой закреплен на валу электродвигателя, а ведомый – на входном валу редуктора. Чем меньшим будет назначено передаточное число ременной передачи, тем меньшим будет диаметр ведомого шкива и компактнее передача (рис. 3). С другой стороны, чем выше частота вращения вала электродвигателя при заданной (потребляемой) мощности, тем меньше его масса и стоимость. В зависимости от числа пар полюсов простые асинхронные электродвигатели имеют теоретические (синхронные, без учета скольжения) частоты вращения: 3000, 1500, 1000, 750  .
.
Рекомендуется назначить стандартное передаточное число ременной передачи:  = 1,12; 1,25; 1,4; 1,6; 1,8.
= 1,12; 1,25; 1,4; 1,6; 1,8.
2 Двухступенчатый цилиндрический редуктор имеет минимальную массу и оптимальную конструкцию, если диаметры колес (ведомых элементов ступеней) будут приблизительно равны друг другу. Это достигается подбором передаточных чисел ступеней: большее – у первой ступени (d  /d
/d  ) и меньшее – у второй (d
) и меньшее – у второй (d  /d
/d  ) (рис. 4).
) (рис. 4).
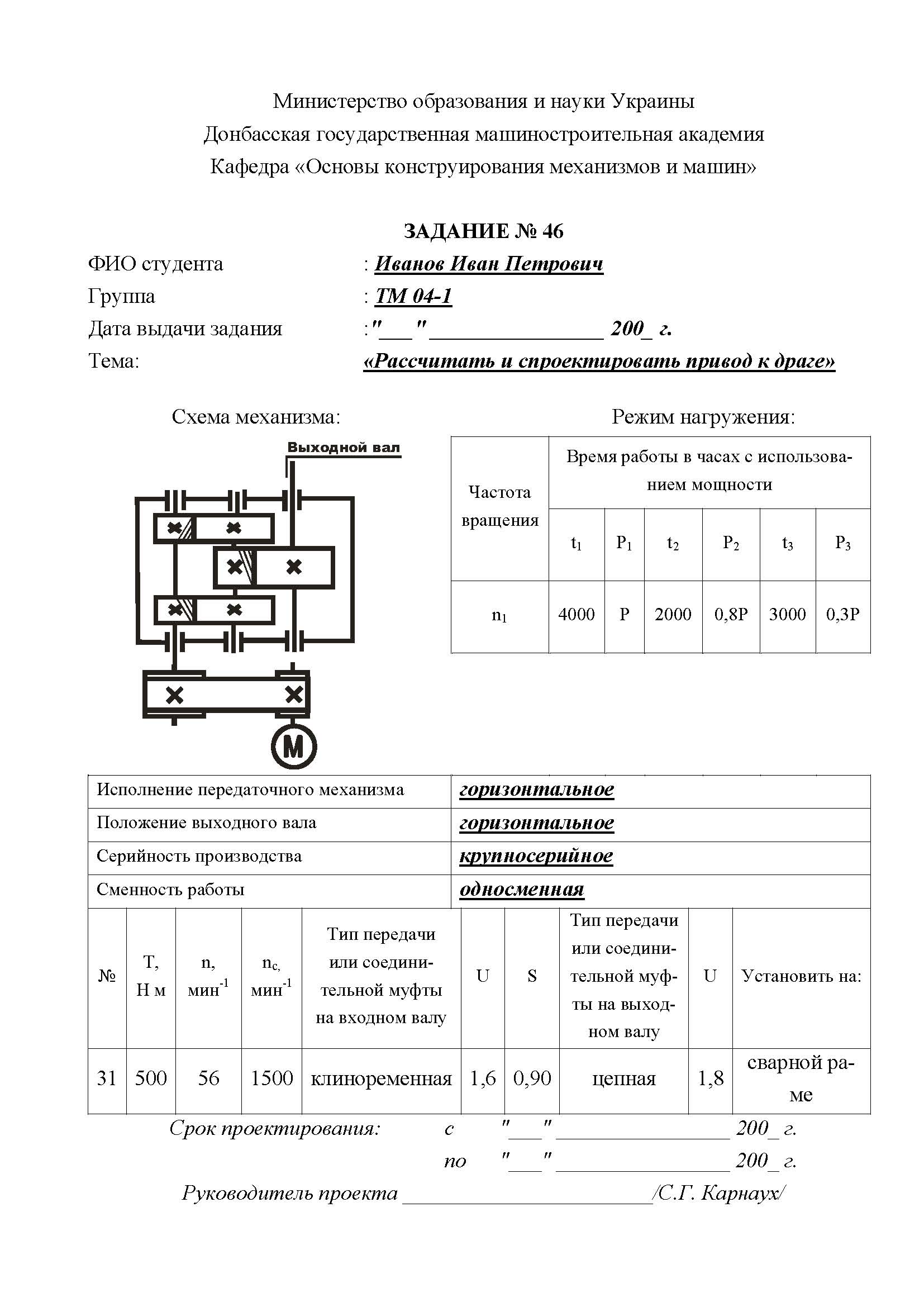
Рисунок 2 – Пример задания на курсовой проект
Рисунок 3 – Ременная передача
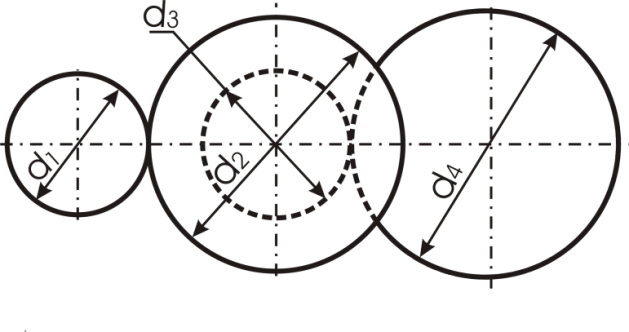
Рисунок 4 – Схема двухступенчатого редуктора
3 Кинематическая цепь привода: ременная передача – первая ступень редуктора – вторая ступень редуктора:
 ,
,
где  – общее передаточное число привода;
– общее передаточное число привода;
 – передаточное число ременной передачи;
– передаточное число ременной передачи;
 - передаточное число первой ступени редуктора;
- передаточное число первой ступени редуктора;
 - передаточное число второй ступени редуктора.
- передаточное число второй ступени редуктора.
4 Привод содержит 4 вала, частоты вращения которых понижаются от электродвигателя к выходу:
 – частота вращения вала электродвигателя (указана в каталоге для каждого типа);
– частота вращения вала электродвигателя (указана в каталоге для каждого типа);
 – частота вращения входного вала редуктора (ведомого шкива и шестерни I ступени);
– частота вращения входного вала редуктора (ведомого шкива и шестерни I ступени);
 – частота вращения промежуточного вала редуктора (шестерни II ступени и колеса I ступени);
– частота вращения промежуточного вала редуктора (шестерни II ступени и колеса I ступени);
 – частота вращения выходного вала редуктора (колеса II ступени и ведущей звездочки цепной передачи).
– частота вращения выходного вала редуктора (колеса II ступени и ведущей звездочки цепной передачи).
5 Потери мощности, оцениваемые КПД, происходят в следующих узлах кинематической цепи: ременной передаче, подшипниках ведущего вала, зацеплении колес I ступени редуктора, подшипниках промежуточного вала, зацеплении колес II ступени редуктора, подшипниках выходного вала, т. е.:
 .
.
1 Выбор электродвигателя
Потребная мощность привода определяется по формуле (1):
 ,
,
где  – КПД привода (2);
– КПД привода (2);
hрп = 0,95 – КПД ременной передачи (см. табл. 6);
hзац = 0,97 – КПД передачи зацеплением, цилиндрической зубчатой (см. табл. 6);
hподш = 0,99 – КПД одной пары подшипников качения (см. табл. 6).
 .
.
Обычно выбирается электродвигатель с номинальной мощностью несколько большей, чем потребляемая. По потребной мощности привода  и синхронной частоте электродвигателя
и синхронной частоте электродвигателя  , из табл. 2 выбираем электродвигатель с характеристиками, указанными в табл. 12.
, из табл. 2 выбираем электродвигатель с характеристиками, указанными в табл. 12.
Таблица 12 – Характеристики электродвигателя
| Типоразмер электродвигателя | Мощность 
| Синхронная частота  , , 
| Рабочая частота  , , 
| Отношение максимального момента к номинальному 
| Диаметр вала электро- двигателя 
|
| 4А100L4У3 | 2,2 |
2 Кинематический расчет
Назначаем передаточное число клиноременной передачи (с учетом рекомендаций ограничивать его величиной  с целью ограничения габаритов передачи) из таблицы стандартных значений передаточных чисел (см. табл. 8):
с целью ограничения габаритов передачи) из таблицы стандартных значений передаточных чисел (см. табл. 8):
 при
при  .
.
Общее передаточное число привода (с учетом ременной передачи) равно по формуле (3):
 .
.
Тогда передаточное число редуктора по формуле (6):
 .
.
При разбивке общего передаточного числа редуктора по ступеням воспользуемся рекомендациями табл. 10 для двухступенчатого цилиндрического трехосного редуктора, согласно которым передаточное число тихоходной ступени определяется зависимостью:

Тогда передаточное число быстроходной ступени составляет:
 .
.
Принимаются стандартные ближайшие значения передаточных чисел из табл. 8:

Фактическое передаточное число редуктора равно:

Погрешность фактического передаточного числа редуктора относительно номинального согласно формуле (12):
 .
.
Поскольку при  = 4% выполняется условие (13)
= 4% выполняется условие (13)  , можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
, можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
3 Расчеты частот, мощностей и вращающих моментов на отдельных элементах привода
Частота вращения ведущего шкива равна частоте вращения вала электродвигателя:
 .
.
Частота вращения ведомого шкива равна частоте вращения входного вала редуктора и установленной на этом валу шестерни быстроходной ступени:
 .
.
Частота вращения промежуточного вала редуктора и закрепленных на нем колеса быстроходной ступени и шестерни тихоходной ступени:
 .
.
Частота вращения выходного (тихоходного) вала двухступенчатого редуктора, ведомого колеса тихоходной ступени и ведущей звездочки цепной передачи равна:
 .
.
Мощности, передаваемые отдельными элементами привода:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Вращающие моменты:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Результаты расчетов приведены в табл. 13.
Таблица 13 – Результаты кинематического расчета
| Параметры | Электродвигатель | Ременная передача | Редуктор | Цепная передача | ||||
| вщ | вд | 
| 
| 
| 
| зв | ||

| 198,7 | 198,7 | 55,96 | 55,96 | ||||
| 3,37 | 3,37 | 3,2 | 3,17 | 3,07 | 3,04 | 2,95 | 2,92 |
| 22,5 | 22,5 | 34,2 | 33,8 | 147,5 | |||

| ¾ | 1,6 | 4,5 | 3,55 | 1,8 |
Пример 2. Выполнить кинематический расчет привода с коробкой скоростей по приведенной схеме и исходным данным (рис. 5).
Общие замечания к расчету
1 Вращающий момент от электродвигателя фланцевого исполнения передается шестерне первой ступени коробки скоростей, и частота вращения шестерни равна частоте вращения вала электродвигателя.
2 Коробка скоростей имеет 2 ступени передач: пару конических зубчатых колес 1-2, постоянно находящихся в зацеплении, на I ступени и две пары зубчатых колес 3-4 и 5-6 с подвижными в осевом направлении, собранными в блок, ведущими элементами (шестернями) на II ступени. За счет перемещения по промежуточному валу блока шестерен 3 и 5 в кинематическую цепь поочередно включаются пары 3-4 или 5-6.
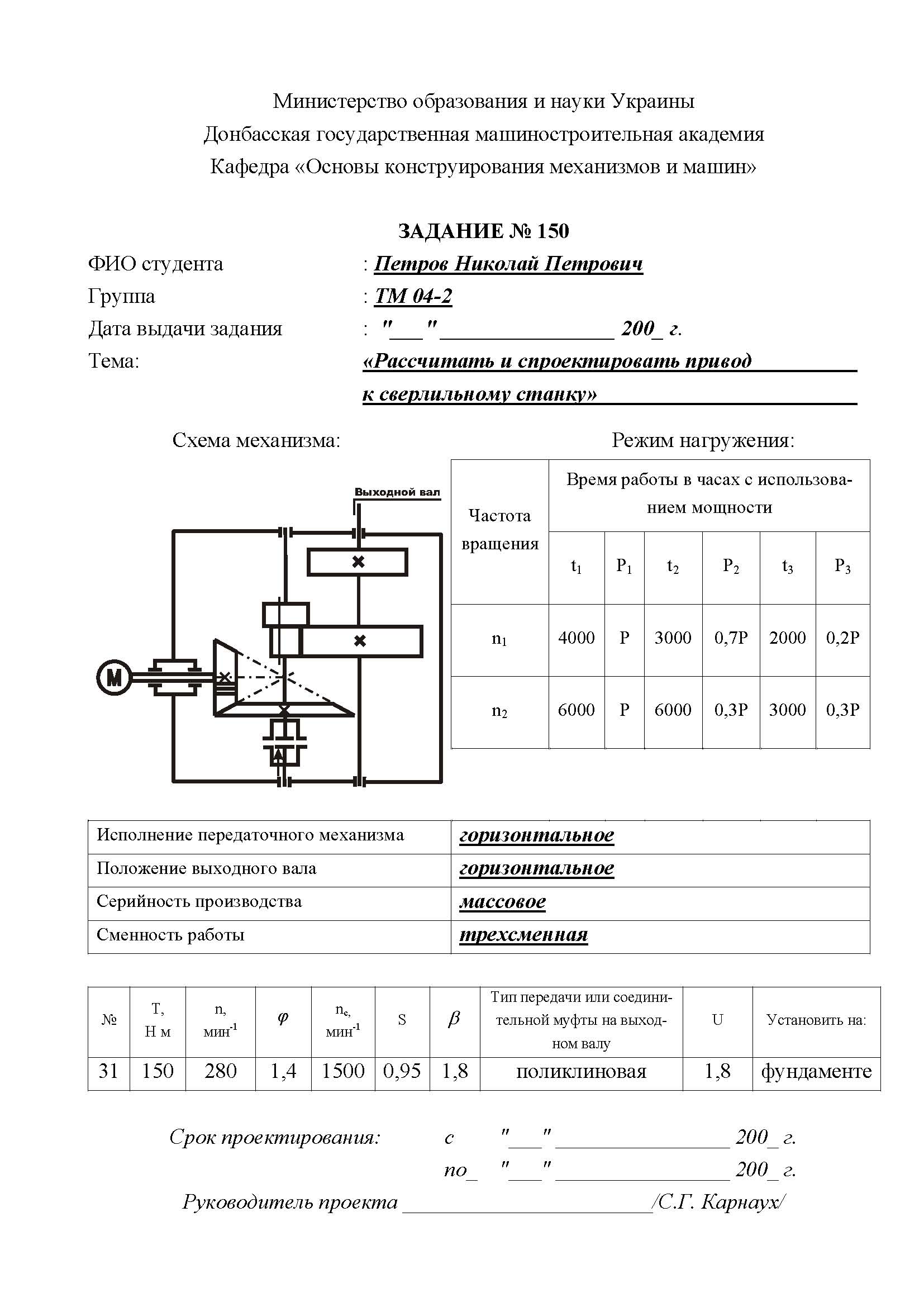
Рисунок 5 – Пример задания на курсовой проект
Поскольку пары II ступени имеют разные передаточные числа (различны диаметры ведущих элементов 3, 5 и ведомых 4, 6), их переключением изменяется частота вращения выходного вала при постоянной частоте вращения входного и промежуточного валов. В конструкции коробки скоростей предусмотрена муфта предохранительная фрикционная дисковая, которая предохраняет привод от перегрузок ( ).
).
3 Коробка скоростей обеспечивает попеременную работу двух кинематических цепей с различными общими передаточными числами:
 ;
;
 ,
,
где  – общее передаточное число первой кинематической цепи, обеспечивающей минимальную частоту вращения выходного вала
– общее передаточное число первой кинематической цепи, обеспечивающей минимальную частоту вращения выходного вала  ;
;
 – общее передаточное число второй кинематической цепи, обеспечивающей частоту вращения выходного вала в
– общее передаточное число второй кинематической цепи, обеспечивающей частоту вращения выходного вала в  раз большую, чем минимальная:
раз большую, чем минимальная:
 ,
,
 .
.
4 При проектировании коробок скоростей стремятся обеспечить:
Ø удобство управления подвижными элементами (расположить их вблизи стенки корпуса);
Ø небольшие усилия при переключении (небольшой вращающий момент на управляемых элементах);
Ø простую и надежную смазку колес;
Ø минимальные габариты механизма.
Эти условия обеспечиваются «сворачиванием» валов механизма, как показано на рис. 6, в отличие от редукторов, где валы обычно располагают в одной плоскости, и назначением небольшого передаточного числа пары колес I ступени меньшего, чем для II ступени.
Поскольку переключающиеся колеса пары II ступени должны иметь меньшую относительную ширину, чем колеса, постоянно находящиеся в зацеплении, ее габариты ограничиваются назначением передаточных чисел:  .
.
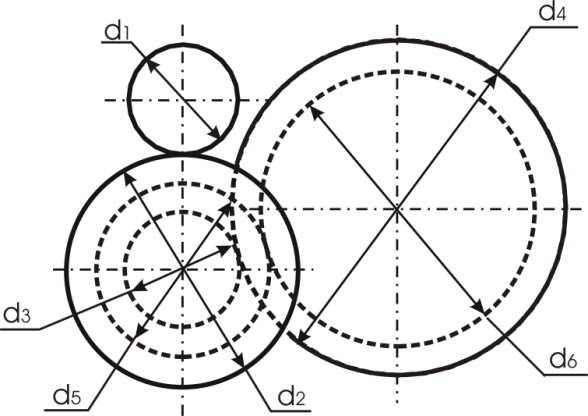
Рисунок 6 – Схема «сворачивания» валов коробки скоростей
5 Потери мощности, оцениваемые КПД, происходят в следующих узлах кинематической цепи: подшипниках входного вала, зацеплении пары колес I ступени, подшипниках промежуточного вала, зацеплении одной из пар колес II ступени, подшипниках выходного вала, т. е.:
 .
.
1 Выбор электродвигателя
Потребная мощность привода определяется по формуле (1):
 ,
,
где  – КПД привода (2);
– КПД привода (2);
 – КПД передачи зацеплением, цилиндрической зубчатой закрытой (см. табл. 6);
– КПД передачи зацеплением, цилиндрической зубчатой закрытой (см. табл. 6);
 – КПД передачи зацеплением, конической зубчатой закрытой (см. табл. 6);
– КПД передачи зацеплением, конической зубчатой закрытой (см. табл. 6);
 – КПД одной пары подшипников качения (см. табл. 6);
– КПД одной пары подшипников качения (см. табл. 6);

Обычно выбирается электродвигатель с номинальной мощностью несколько большей, чем потребляемая. Допускается перегрузка электродвигателя до 8% при постоянной и до 12% при переменной нагрузке. По потребной мощности привода  и синхронной частоте электродвигателя , из табл. 2 выбираем электродвигатель с характеристиками (табл. 14).
и синхронной частоте электродвигателя , из табл. 2 выбираем электродвигатель с характеристиками (табл. 14).
Таблица 14 – Параметры электродвигателя
| Типоразмер электродвигателя | Мощность
| Синхронная частота ,
| Рабочая частота
,
| Отношение максимального момента к номинальному
| Диаметр вала электродвигателя 
|
| 4А112М4У3 | 5,5 | 2,2 |
2 Кинематический расчет
Ø Расчет требуемых частот вращения выходного вала:
 ;
;
 .
.
Ø Передаточные числа кинематических цепей:

 ;
;

 .
.
Ø Назначение передаточных чисел зубчатых пар коробки скоростей.
Назначение передаточных чисел ступеней производят путем подбора с учетом замечаний, приведенных ранее. Кинематические цепи обеспечиваются парами колес со следующими стандартными передаточными числами из табл. 8 (указаны в скобках):
 :
:
1,12  4,607 (4,50);
4,607 (4,50);
1,25  4,128 (4,00);
4,128 (4,00);
1,40 3,686 (3,55);
1,60 3,225 (3,15);
1,80 2,87 (2,80);
2,00 2,58 (2,50).
 :
:
1,12 3,24 (3,15);
1,25 2,90 (2,80);
1,40 2,59 (2,60);
1,60 2,27 (2,24);
1,80 2,02 (2,00).
Оптимальное сочетание габаритов пар зубчатых колес, малая погрешность и выполнение условия  £ 3,15 обеспечиваются передаточными числами:
£ 3,15 обеспечиваются передаточными числами:
 ;
;  ;
;  .
.
Ø Фактические передаточные числа кинематических цепей коробки скоростей равны:
 ;
;

Погрешность фактического передаточного числа коробки скоростей по двум кинематическим цепям относительно номинального согласно формуле (12):
 ;
;
 .
.
Поскольку при  выполняется условие (13)
выполняется условие (13)  , можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
, можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
3 Расчеты частот, мощностей и вращающих моментов на отдельных элементах привода
Ø Частота вращения входного вала коробки скоростей и установленной на этом валу шестерни быстроходной ступени равна частоте вращения вала электродвигателя:
 .
.
Ø Частота вращения промежуточного вала коробки скоростей и закрепленных на нем колеса быстроходной ступени и блока шестерен тихоходной ступени
 .
.
Ø Частоты вращения выходного (тихоходного) вала коробки скоростей, ведомых колес тихоходных ступеней 3-4 и 5-6, ведущего шкива ременной передачи равны:
 ;
;
 .
.
Ø Мощности, передаваемые отдельными элементами привода:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Ø Вращающие моменты:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Результаты расчетов приведены в табл. 15.
Таблица 15 – Результаты кинематического расчета
| Параметры | Электродвигатель | Коробка скоростей | Ременная передача | |||||
| I ступень | II ступень | |||||||
|
|
|
|
| 
| 
| вщ | ||
|
| 802,8 | 802,8 | 286,7 | 802,8 | 401,4 | 286,7 | ||
| 401,4 | ||||||||
|
| 4,87 | 4,82 | 4,63 | 4,58 | 4,44 | 4,58 | 4,44 | 4,4 |
|
| 32,2 | 31,9 | 55,1 | 54,5 | 147,9 | 54,5 | 105,6 | 146,6 |
| 104,7 | ||||||||

| | 1,8 | 2,8 | 1,8 |
Пример 3. Выполнить кинематический расчет привода с зубчато-червячным редуктором по приведенной схеме и исходным данным (рис. 7).
Общие замечания к расчету
1 Вращающий момент передается от электродвигателя входному валу редуктора через соединительную компенсирующую упругую втулочно-пальцевую муфту (МУВП), и частота вращения входного вала равна частоте вращения вала электродвигателя.
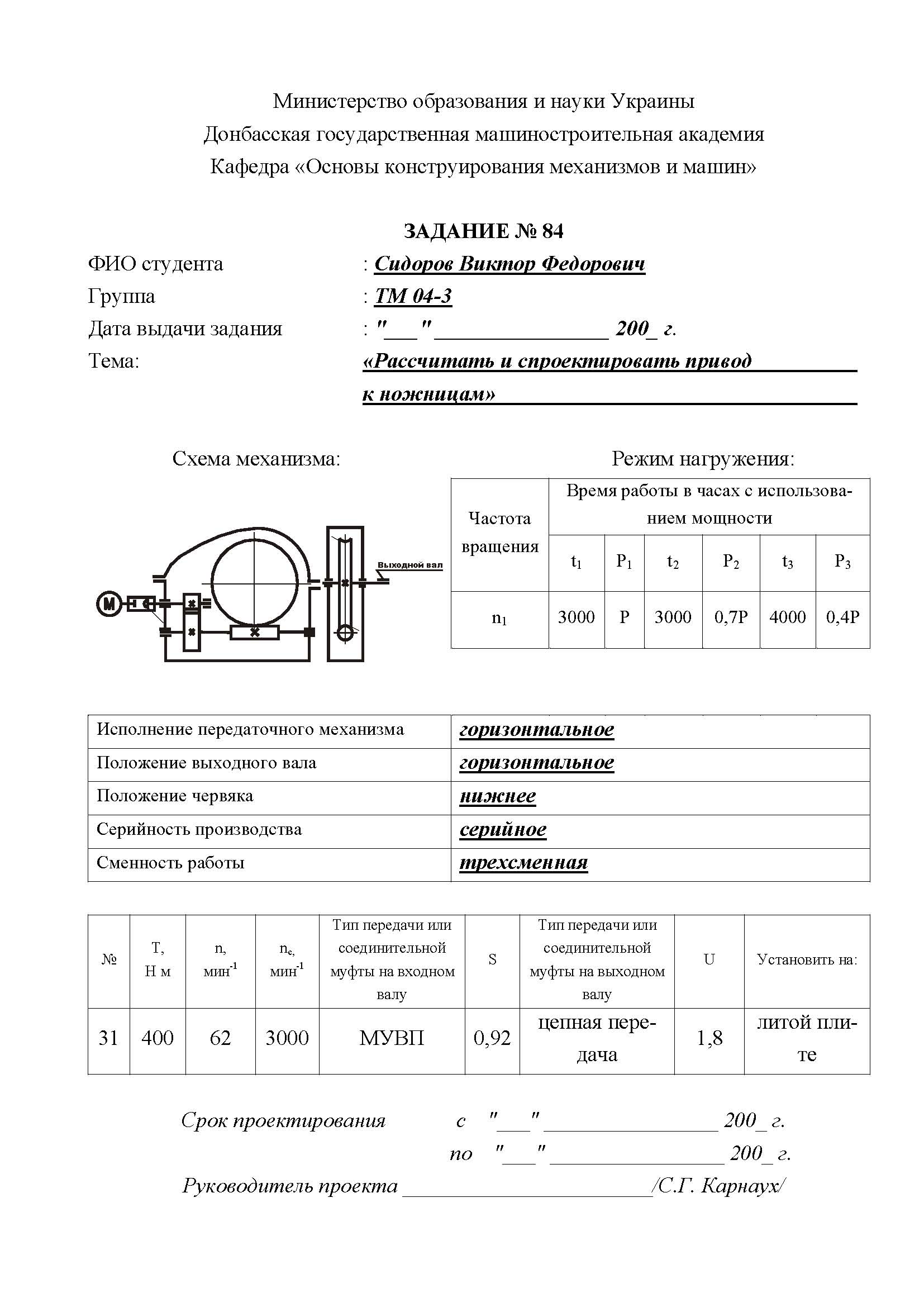
Рисунок 7 – Пример задания на курсовой проект
2 Редуктор двухступенчатый: на первой ступени – пара цилиндрических зубчатых колес (1-2), на второй ступени – червяк – червячное колесо (3-4).
3 Двухступенчатый зубчато-червячный редуктор имеет оптимальную конструкцию, если пару цилиндрических зубчатых колес с их опорами на подшипниках качения удается разместить в корпусе ниже разъема «корпус – крышка», то есть когда
 ,
,
где  – межосевое расстояние пары цилиндрических зубчатых колес,
– межосевое расстояние пары цилиндрических зубчатых колес,
 – межосевое расстояние червячной пары.
– межосевое расстояние червячной пары.
Кроме того, большой диаметр ведомого элемента (колеса) цилиндрической передачи излишне увеличивает ширину корпуса редуктора. Поэтому передаточное число цилиндрической передачи рекомендуется назначать в пределах:
 при
при  .
.
4 Кинематическая цепь привода: электродвигатель – передача цилиндрическими зубчатыми колесами – червячная передача, т. е.:
 ,
,
где  – общее передаточное число редуктора;
– общее передаточное число редуктора;
 – передаточное число передачи цилиндрическими колесами;
– передаточное число передачи цилиндрическими колесами;
 – передаточное число червячной передачи.
– передаточное число червячной передачи.
5 Привод содержит 3 вала, частоты вращения которых:
·  – частоты вращения валов электродвигателя и входного, частота вращения ведущего элемента цилиндрической передачи;
– частоты вращения валов электродвигателя и входного, частота вращения ведущего элемента цилиндрической передачи;
·  – частота вращения промежуточного вала, ведомого элемента цилиндрической передачи и червяка;
– частота вращения промежуточного вала, ведомого элемента цилиндрической передачи и червяка;
·  – частота вращения выходного вала, червячного колеса и ведущей звездочки цепной передачи.
– частота вращения выходного вала, червячного колеса и ведущей звездочки цепной передачи.
6 Потери мощности, оцениваемые КПД, учитываются в следующих узлах привода: подшипниках входного вала, зацеплении пары цилиндрических колес, подшипниках промежуточного вала, зацеплении червячной передачи, подшипниках выходного вала.
 .
.
1 Выбор электродвигателя
Потребная мощность привода определяется по формуле (1):
 ,
,
где  ;
;
 – КПД пары подшипников качения (см. табл. 6):
– КПД пары подшипников качения (см. табл. 6):
 – КПД зацепления пары цилиндрических зубчатых колес при 8…9-й степени точности (см. табл. 6).
– КПД зацепления пары цилиндрических зубчатых колес при 8…9-й степени точности (см. табл. 6).
КПД червячной передачи можно приближенно оценить по формуле:
 ,
,
где  – передаточное отношение червячной передачи. Если из рекомендаций принять
– передаточное отношение червячной передачи. Если из рекомендаций принять  , а ориентировочное передаточное отношение редуктора
, а ориентировочное передаточное отношение редуктора  , то передаточное отношение червячной передачи можно оценить как
, то передаточное отношение червячной передачи можно оценить как  . Полученное значение КПД червячной передачи находится в рекомендованных пределах
. Полученное значение КПД червячной передачи находится в рекомендованных пределах  при числе заходов червяка
при числе заходов червяка  (см. табл. 6).
(см. табл. 6).
Обычно выбирается электродвигатель с номинальной мощностью несколько большей, чем потребляемая. По потребной мощности привода  и синхронной частоте электродвигателя
и синхронной частоте электродвигателя  , из табл. 2 выбираем электродвигатель с характеристиками, указанными в табл. 16.
, из табл. 2 выбираем электродвигатель с характеристиками, указанными в табл. 16.
Таблица 16 – Характеристики электродвигателя
| Типоразмер электродвигателя | Мощность
| Синхронная частота , 
| Рабочая частота  , ,
| Отношение максимального момента к номинальному
| Диаметр вала электродвигателя
|
| 4А100S2У3 | 2,2 |
2 Кинематический расчет
Общее передаточное число привода равно:
 .
.
При разбивке общего передаточного числа редуктора по ступеням воспользуемся рекомендациями табл. 10 для зубчато-червячного редуктора, согласно которым передаточное число тихоходной ступени определяется зависимостью:
 при
при  .
.
Принимается:  .
.
Тогда 
Из стандартного ряда (см. табл. 9) назначаем 
Фактическое передаточное число редуктора равно:

Погрешность фактического передаточного числа редуктора относительно номинального согласно формуле (12):
 .
.
Поскольку при выполняется условие (13)  , можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
, можно сделать заключение о том, что кинематический расчет выполнен удовлетворительно.
3 Расчеты частот, мощностей и вращающих моментов на отдельных элементах привода
Частота вращения входного вала редуктора и установленной на этом валу шестерни быстроходной ступени равна частоте вращения вала электродвигателя:
 .
.
Частота вращения промежуточного вала редуктора и закрепленных на нем колеса быстроходной ступени и червяка тихоходной ступени:
 .
.
Частоты вращения выходного (тихоходного) вала двухступенчатого редуктора, ведомого червячного колеса тихоходной ступени и ведущей звездочки цепной передачи равны:
 .
.
Мощности, передаваемые отдельными элементами привода:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Вращающие моменты:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Результаты расчетов приведены в табл. 17.
Таблица 17 – Результаты кинематического расчета
| Параметры | Электродвигатель | Редуктор | Цепная передача | |||
| I ступень | II ступень | |||||
|
|
|
|
| |||
|
| ||||||
|
| 3,45 | 3,42 | 3,31 | 3,28 | 2,62 | 2,6 |
|
| 11,44 | 11,34 | 19,76 | 19,58 | ||

| | 1,8 | 1,8 |
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 987; Нарушение авторских прав?; Мы поможем в написании вашей работы!