КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лабораторна робота №1
|
|
|
|
«СИСТЕМНИЙ АНАЛІЗ ПРОЦЕСУ УПРАВЛІННЯ В СИСТЕМАХ З КОМПЕНСАЦІЄЮ КООРДИНАТНИХ ТА ПАРАМЕТРИЧНИХ ЗБУРЕНЬ»
Мета, завдання і тривалість роботи.
МЕТА: ознайомитись з структурами систем з компенсацією координатних та параметричних збурень.
ЗАВДАННЯ: вивчити задані структури систем управління.
ТРИВАЛІСТЬ РОБОТИ: 2 академічні години.
Основні теоретичні положення
Системи із компенсацією координатних та параметричних збурень
Ці системи – для нестаціонарних об’єктів, або об’єктів з невідомими характеристиками. Тоді принципи управління, які визначають функціональну структуру системи, можна класифікувати так:
- за ступенем нестаціонарності динамічних властивостей об’єкта;
- за способом завдання бажаного функціонування;
- за способом компенсації впливу нестаціонарності об’єкта.
Загальним для цих класів систем – властивість адаптації за рахунок:
- вибору величини і частоти корекції управляючих діянь на основі рекурентних алгоритмів обробки наявної інформації про хід процесів в об’єкті;
- зміни динамічних властивостей (параметрів) системи заданої структури (системи із самонастройкою);
- комутацією структури та режимів роботи системи (системи із змінною структурою).
Системи координатно-параметричного управління
Системи із самонастройкою використовують у тих випадках, коли степінь нестаціонарності динамічних характеристик ОУ є суттєвою, і її не вдається компенсувати ні зміною параметрів, ні додатковими діяннями.
Використовуються два способи:
- організація прямого діяння від прямо чи непрямо (побічно) вимірюванних нестаціонарних параметрів динамічних характеристик ОУ на змінюванні координати ОУ;
- організація контура компенсації із зворотніми зв’язками по вимірювальним нестаціонарним динамічним властивостям об’єкта
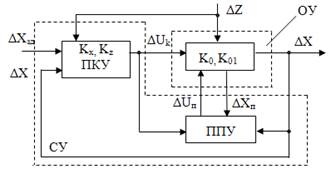
Рисунок 1.1. Структура системи координатно-параметричного управління:
ППТУ – пристрій параметричного управління;
ПКУ – пристрій координатного управління;
СУ – система управління
Основна проблема при створенні – оптимальне сполучення контурів координатного та параметричного управлінь.
Безпошукові системи із самонастройкою
Спосіб компенсації полягає у вимірюванні та неперервній компенсації відхилень фактичної траекторії зміни координат, які визначають рівень якості функціонування об’єкта, від бажаних траєкторій, які визначають заданий рівень якості.
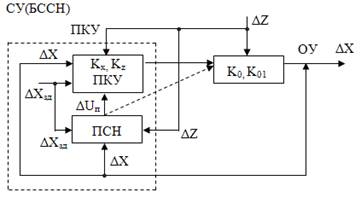
Риснунок 1.2. Структура безпошукової системи із самонастройкою:
ПКУ – пристрій координатного управління;
ПСН – пристрій самонастройки.
Бажаний режим роботи може бути оптимальним, тоді – оптимальні системи із самонастройкою. Можуть бути з явними оцінками: за контролером частотних характеристик, або кореляційних функцій вхід-вихід.
Пристрій самонастройки (адаптації) мінімізує відхилення фактичної траєкторії від бажаної, формуючи  на ПКТ. Часом може бути додаткове діяння
на ПКТ. Часом може бути додаткове діяння  .
.
Пошукові системи із самонастройкою
Спосіб компенсації – в автоматичному виборі за допомогою пошукового пристрою самонастройки таких значень параметрів основного контура, при яких забезпечується extr функціонала якості. Часто – процедури чисельного пошуку.
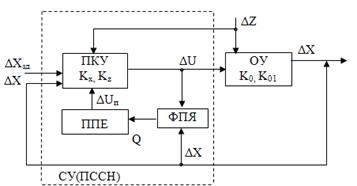
Рисунок 1.3. Структура пошукові системи із самонастройкою:
ПКУ – пристрій координатного управління;
ФПЯ – формувач показників якості управління;
ППЕ – пристрій пошуку екстримального значення
показника якості.
Обмеження: швидкість процесу пошуку (швидкість збіжності) повинна бути більшою швидкості зміни динамічних властивостей об’єкта. При цьому – чим більша ця різниця, тим краща якість функціонування.
Автоматичні системи з ідентифікатором
Спосіб компенсації схожий на системи з еталонною моделлю, але в цьому випадку використовується повна або частково настроювана модель об’єкта, яка адаптується в процесі роботи.
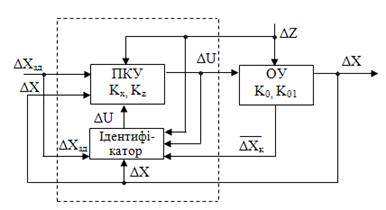
Рисунок 1.4. Структура адаптивної системи з ідентифікатором:
ПКУ – пристрій координатного управління.
За допомогою цієї моделі визначаються сукупності управляючих діянь, які забезпечують екстримальне або допустиме в конкретних випадках значення показника якості управління.
Для складних об’єктів, які характеризуються різними моделями використовуються кілька ідентифікаторів: оперативні (які відслідковують кількісні зміни параметрів) та стратегічні (які відслідковують зміни виду динамічних операторів структури об’єкта).
Системи із змінною структурою
В цих системах в залежності від бажаної якості регулювання та стану об’єкта дискретно змінюється закон регулювання, тобто структура системи (набір функціональних елементів та зв’язків між ними). Конкретний набір структур управляючого пристрою та логічні їх переключення в процесі зміни вихідних координат залежать не лише від виду математичного опису процесів в об’єкті та характеру зміни його параметрів, а й від того, які координати доступні вимірюванню.
В основі системи із змінною структурою лежать дві ідеї:
- перехідні процеси за збуренням чи зміною завдання складаються з відрізків (кусків) траєкторії системи, які відповідають різним динамічним ланкам, що автоматично комутуються при виконанні наперед встановлених співвідношень між значеннями координат об’єкта, регулюючого пристрою та збурень;
- створюється штучний ковзний рух в системі; характерний для нелінійних систем, який практично не залежить від змінюваних параметрів об’єкта. Цей рух забезпечується вибором відповідних операторів в законі управління та порядку їх переключення.
Ці системи використовуються як засіб боротьби із змінюваними параметрами об’єкта та для забезпечення високої якості регулювання, як є для систем з незмінюваною структурою часто протирічними.
Порядок виконання лабораторної роботи
1 Ознайомлення з метою і завданням роботи.
2 Вивчити основні теоретичні положення.
3 Згідно індивідуального завдання викладача з позицій системного підходу проаналізувати одну із структур систем:
- координатно-параметричного управління;
- безпошукових систем із самонастройкою;
- пошукових систем із самонастройкою;
- автоматичних адаптивних систем з ідентифікатором;
- систем із змінною структурою.
4 Зробити висновки.
Методичні рекомендації щодо виконання роботи
Основні формули для обчислення, довіфдкову інформацію використати із навчального посібника [1], розділ 3. Результати аналізу заданої структури оформити у вигляді звіту.
Вказівки щодо підготовки заняття.
Для підготовки до занять слід ознайомитись із щмістом розділу 3 навчального посібника А.П.Ладанюка «Основи системного аналізу» [1].
|
|
|
|
|
Дата добавления: 2015-05-24; Просмотров: 469; Нарушение авторских прав?; Мы поможем в написании вашей работы!