КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Задачи, решаемые с помощью диаграмм статической остойчивости
|
|
|
|
Практические задачи, решаемые с помощью диаграмм статической и динамической остойчивости
Задач, которые решаются с помощью диаграмм статической и динамической остойчивости очень много, но ввиду ограниченности времени изучения дисциплины мы приводим только основные. Для студентов, интересующихся этим вопросом, преподаватель может пореко-мендовать соответствующую литературу.
Предположим, что на судно действует момент Мкр, не зависящий от угла крена. На диаграмме моментов (рис. 4) он будет изображаться прямой линией, которая пересекается с кривой восстанавливающего момента Mв в точках А и В. Точки А и В являются точками статического равновесия, так как в них соблюдается равенство кренящего и восстанавливающего моментов Мкр = Мв.
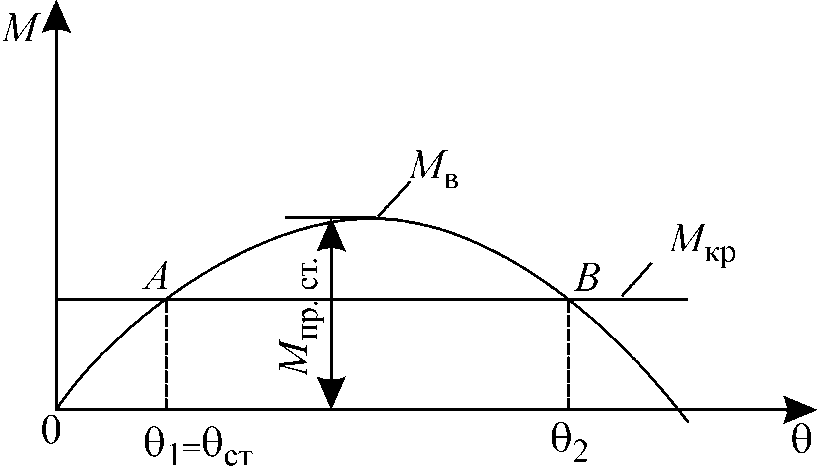
Рис. 4. Определение статических углов крена при действии Mкр
В точке А угол θ1 - угол устойчивого равновесия, так как, если судно вывести из положения равновесия в этой точке, увеличив, например, угол θ1 на δθ, то, будучи предоставлено самому себе, судно под действием восстанавливающего моментавернется в прежнее положение. Если же вывести судно из положения равновесия, уменьшив угол на δθ, то оно под действием кренящего момента также вернется в прежнее положение. При этом в точке А
 . (7)
. (7)
В точке В угол θ2 характеризует положение неустойчивого равновесия, так как, если вывести судно из положения равновесия, добавив δθ, кренящий момент будет больше восстанав-ливающего, и оно будет крениться дальше, пока не опрокинется. Если же θ2 уменьшить на величину δθ, получится Мкр < Мв, и судно перейдет в положение равновесия θ1. В точке В
 . (8)
. (8)
Таким образом, только угол θ1 будет углом статического равновесия. Его обозначают θст.
Если Мкр = Мmax, точки А и В сольются в точке касания, получится безразличное равновесие, которое по определению не является остойчивым.
Судно может практически безопасно плавать в наклонном положении при углах, меньших θmax, так как при углах крена, больших θmax, всегда могут найтись такие внешние силы, которые переведут судно из положения равновесия к углу заката диаграммы, и оно опрокинется.
Максимальный кренящий момент Мкр = Mmax, который судно может выдерживать не опроки-дываясь называется предельным статическим кренящиммоментом Mпр.ст. Соответствующий ему угол θmax будет предельным статическим углом крена.
Разница между Мпр.ст и каким-либо статически приложенным моментом характеризует запас статической остойчивости судна.
В случае действия на судно динамически приложенного кренящего момента условием равновесия будет равенство не моментов, а равенство их работ Ткр = Тв, или
 , (9)
, (9)
где θдин - угол крена, соответствующий углу динамического равновесия(рис. 5).
Угол θдин может определяться графически из следующих соображений. Интегралы являются площадями фигур ODFDEO и OACDEO, ограниченными сверху Мкр и Мв, а справа - абсциссой θдин и характеризуют работы соответствующих моментов. Уравнивая площади этих фигур, получаем θдин. Можно этот угол определить и более просто. Так как дважды заштрихованная площадь OADE0 – общая, можно уравнять площади треугольников ОВА и АCD (рис. 6).
Как мы видим, для одного и того же кренящего момента, но приложенного динамически или статически, динамический угол крена больше статического, т.е. θдин > θст.
Максимальный динамически приложенный кренящий момент, который еще не опрокинет судно, определяется из условия приравнивания площадей ОВА и АCD так, чтобы не осталось незаштрихованных площадей между кренящим и восстанавливающим моментами (рис. 7). Этот кренящий момент называется предельным динамическим моментом М.пр.дин. Предельный динамический момент меньше предельного статического момента, т.е. динамически прило-женный кренящий момент опаснее статически приложенного.
Разница между Мпр.дин и каким-либо динамически приложенным кренящим моментом характеризует запас динамической остойчивости.
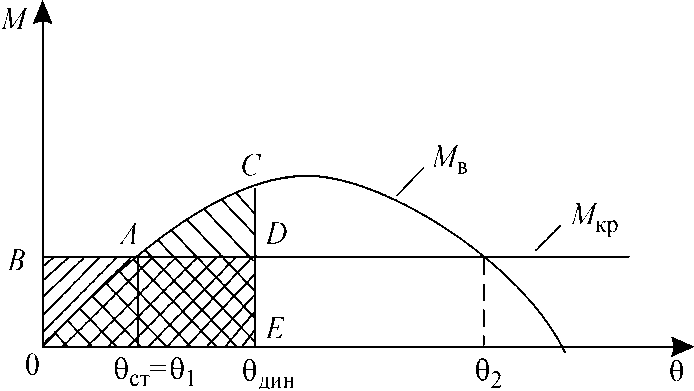
Рис. 5. Определение θдин
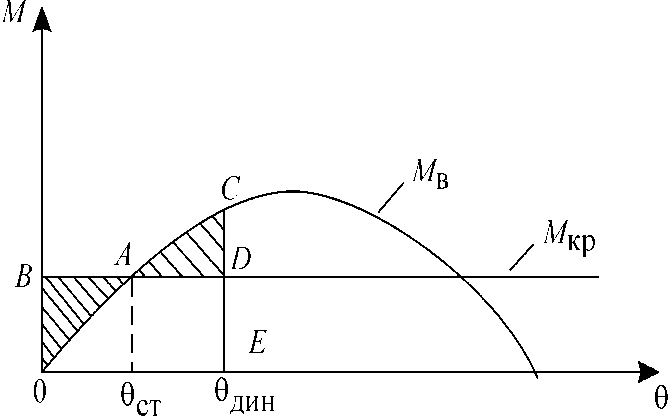
Рис. 6. Определение θдин по упрощенной модели
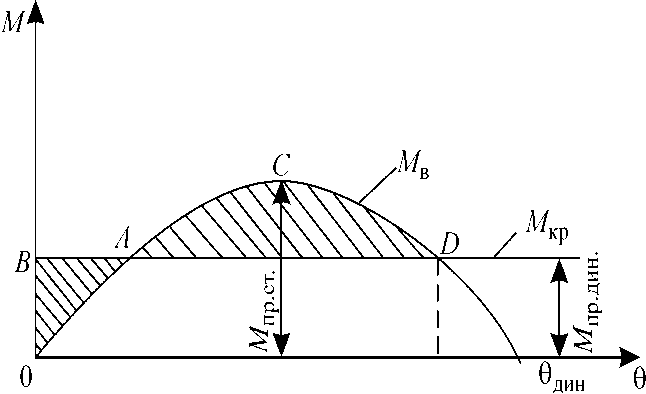
Рис. 7. Определение предельного динамического момента
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2304; Нарушение авторских прав?; Мы поможем в написании вашей работы!