КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример. Например, для передаточной функции вида:
|
|
|
|
Например, для передаточной функции вида:

вводятся обозначения: a0 = 1; a1 = 0.1;a3 = 0.01; b0 = 2; b1 = 0.01; b2 = 0.01; b3=0.001; b4=0.0001.
По структурной схеме и на основе системы составляется система дифференциальных уравнений САР:
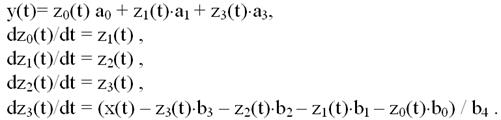
В системе y(t) – функция времени регулируемой величины, то есть временная зависимость реакции САР на воздействие; х(t) – функция времени задающего воздействия; zi(t) – функции времени дополнительных переменных состояния Zi.
Численное решение системы дифференциальных уравнений позволяют получить функции Mathcad, реализующие, например, метод Рунге-Кутта четвертого порядка точности (см. Приложение).
Рассмотрим порядок использования функции Rkadapt() для численного решения системы ОДУ описываемой в примере САР.
Для использования функции Rkadapt() необходимо выполнить следующие шаги, которые проиллюстрируем с помощью рассматриваемого примера передаточной функции.
1. Задать функцию х(t). Например, для единичного ступенчатого воздействия х(t)=1.

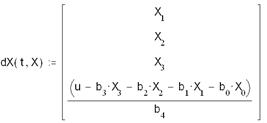
2. Создать вектор системы обыкновенных дифференциальных уравнений.
3. Задать начальные значения вектора системы.

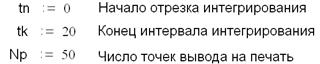
4. Задать временной интервал наблюдения решения и количество расчетных точек наблюдения решения.
5. Создать выражение с функцией Rkadapt().

6. Результат решения – матрица, содержащая численные значения компонент решения y(t).

Столбец матрицы Yn,0 содержит значения текущего времени наблюдаемого переходного процесса.
Представим передаточные функции рассматриваемой САР с П, ПИ, ПД и ПИД регуляторами в виде отношения полиномов. Результаты представления сведем в таблицу 4.
Таблица 4 – Преобразование передаточных функций САР
| № п/п | регу-лятор | исходная передаточная функция САР | преобразованная передаточная функция САР |
| П | 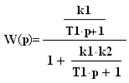
| 
| |
| ПИ | 
| 
| |
| ПД | 
| 
| |
| ПИД | 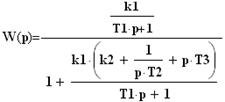
| 
|
Преобразованные к виду отношения полиномов передаточные функции САР позволяют рассчитать переходные характеристики САР, используя функцию Rkadapt() Mathcad.
|
|
|
|
|
Дата добавления: 2015-06-25; Просмотров: 552; Нарушение авторских прав?; Мы поможем в написании вашей работы!