КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
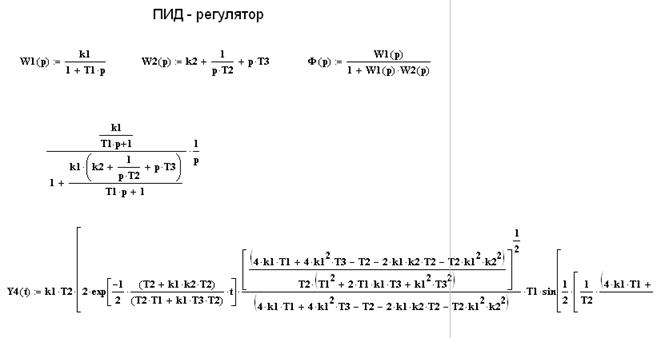
Пример выполнения этапов работы для САР с ПИД регулятором
|
|
|
|
Контрольные вопросы
Содержание отчета
Порядок выполнения работы.
В соответствии с полученным вариантом задания (см. таблицу 5) выполнить следующие работы.
1). Построить переходные характеристики САР с П, ПИ, ПД и ПИД регуляторами, используя операцию обратного преобразования Лапласа. Для построения использовать передаточные функции и методику п.2.
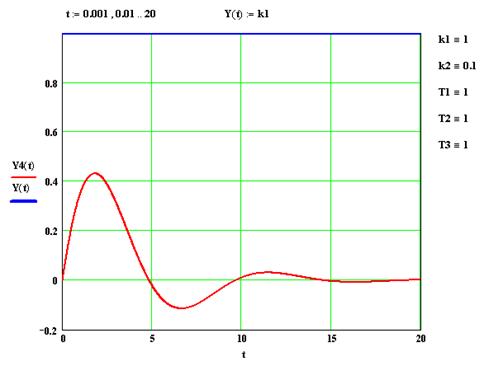
Результат расчета представить графически (см. рис.5).
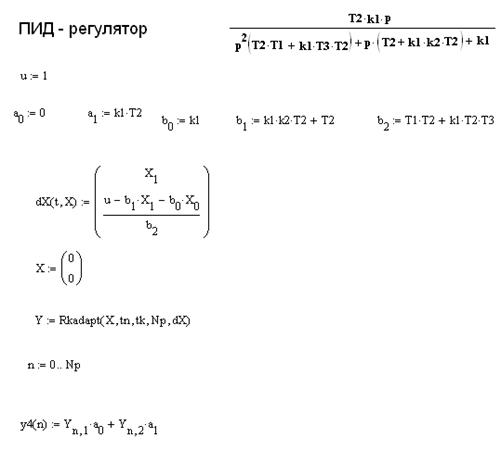
2). Построить переходные характеристики САР с П, ПИ, ПД и ПИД регуляторами, используя функцию Rkadapt() Mathcad. Для построения использовать передаточные функции и методику п.3.
Результат расчета представить графически.
Сравнить результаты расчета по п.1 и 2.
3). По графикам переходных характеристик определить показатели качества процесса регулирования:
- время регулирования,
- величину перерегулирования,
- число колебаний за время регулирования,
- период колебаний.
Таблица 5 – Варианты задания коэффициентов передаточной функции САР
| Вариант | k1 | T1 | k2 | T2 | T3 |
| 0.1 | |||||
| 0.2 | |||||
| 0.3 | |||||
| 0.4 | |||||
| 0.5 | |||||
| 0.6 | |||||
| 0.7 | |||||
| 0.8 | |||||
| 0.9 | |||||
1. Наименование работы.
2. Цель работы.
3. Задание на работу.
4. Вывод передаточных функций САР с П, ПИ, ПД, ПИД регуляторами для объекта регулирования – инерционного звена.
5. Порядок получения переходной характеристики САР с использованием обратного преобразования Лапласа.
6. Порядок получения переходной характеристики САР с использованием функции Mathcad Rkadapt().
7. Графики переходных процессов САР для полученного варианта задания.
8. Количественные оценки показателей качества процесса регулирования.
1. Свойства пропорционального звена.
2. Свойство интегрирующего звена.
3. Свойства дифференцирующего звена.
4. Свойства инерционного звена.
4. Что такое обратная связь?
5. Что такое передаточная функция?
6. Что такое переходная характеристика?
7. Понятие о прямом и обратном преобразовании Лапласа, его свойства.
8. Порядок реализации прямого и обратного преобразования Лапласа в Mathcad.
9. Что такое обыкновенное дифференциальное уравнение?
10. Порядок использования функций численного решения ОДУ в Mathcad.
11. Перечислите показатели качества САР.
Обратное преобразование Лапласа:
Графическое представление переходного процесса САР:
Решение системы ОДУ для разложения передаточной функции с помощью дополнительных переменных:
Графическое представление переходного процесса САР:
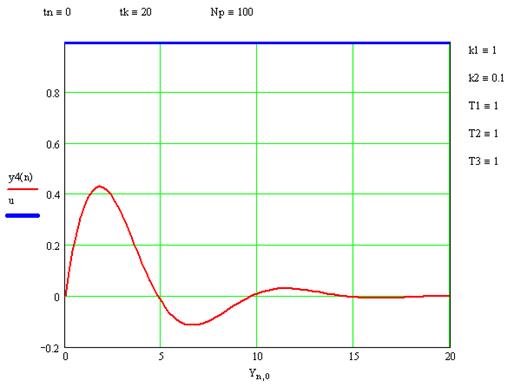
Показатели качества процесса регулирования:
- время регулирования – 20с,
- величина перерегулирования – 0,45,
- число колебаний за время регулирования - 2,
- период колебаний – 10с.
Литература.
1 Дьяконов В.П. Справочник по MathCAD PLUS 7.0 PRO - М.: СК Пресс, 1998 - 352 с.
2 Дьяконов В.П. MATHCAD 8/2000: Специальный справочник – СПб.: Издательство «Питер», 2000 – 592 с.
3 Кудрявцев Е.М. Mathcad 8. – М.: ДМК, 2000 – 320 с.
4 Тарасик В.П. Математическое моделирование технических систем: Учебник для вузов. - Мн.: ДизайнПРО, 1997. -640 с.
5 Трофимов А.И., Егупов Н.Д., Дмитриев А.Н. Методы теории автоматического управления, ориентированные на применение ЭВМ. Линейные стационарные и нестационарные модели: Учебник для вузов. - М.: Энергоатомиздат, 1997. - 656 с.
6. www.cdo.bru.mogilev.by
Приложение
|
|
|
|
|
Дата добавления: 2015-06-25; Просмотров: 626; Нарушение авторских прав?; Мы поможем в написании вашей работы!