КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематика мотовила
|
|
|
|
При работе жатки планка мотовила совершает сложное движение: переносное вместе с машиной по полю со скоростью VM и относительное с угловой частотой w. Если оси координат расположить так, как указано на рис. 3, и за исходное принять горизонтальное положение луча С0А0, то в произвольный момент центр мотовила переместится в точку С, а луч повернется на некоторый угол j. Проектируя точку А на оси координат, можно получить
 . (1)
. (1)
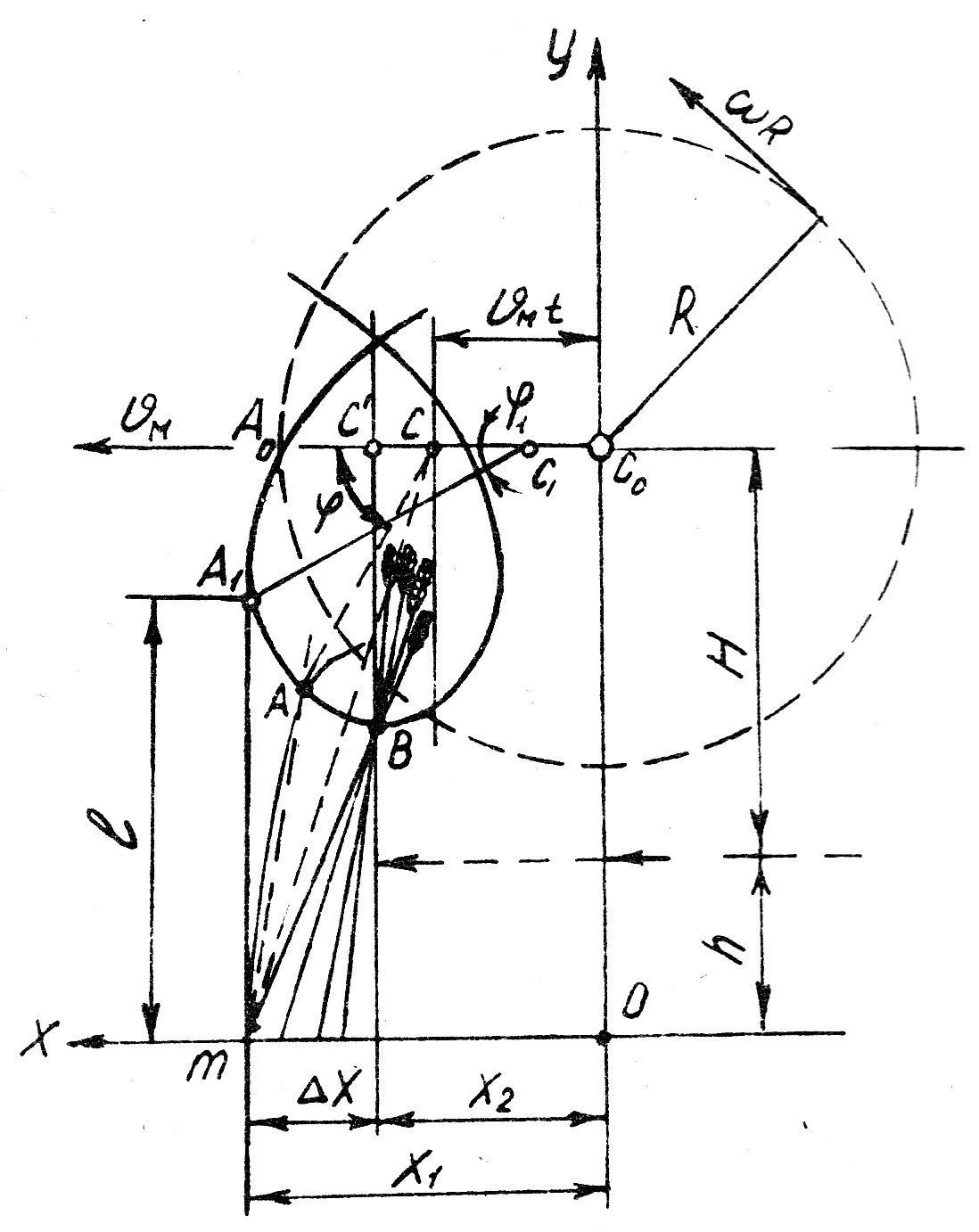
Рис. 3. Схема работы планки мотовила
Принимая во внимание, что  , а
, а  и
и  , систему уравнений можно представить иначе:
, систему уравнений можно представить иначе:
 , (2)
, (2)
где H - высота установки вала мотовила над линией ножа;
h - высота установки режущего аппарата.
Траектория, описываемая параметрическими уравнениями (2), представляет собой циклоиду, форма которой зависит главным образом от соотношений l окружной wR и поступательной VM скорости планки (рис. 4).
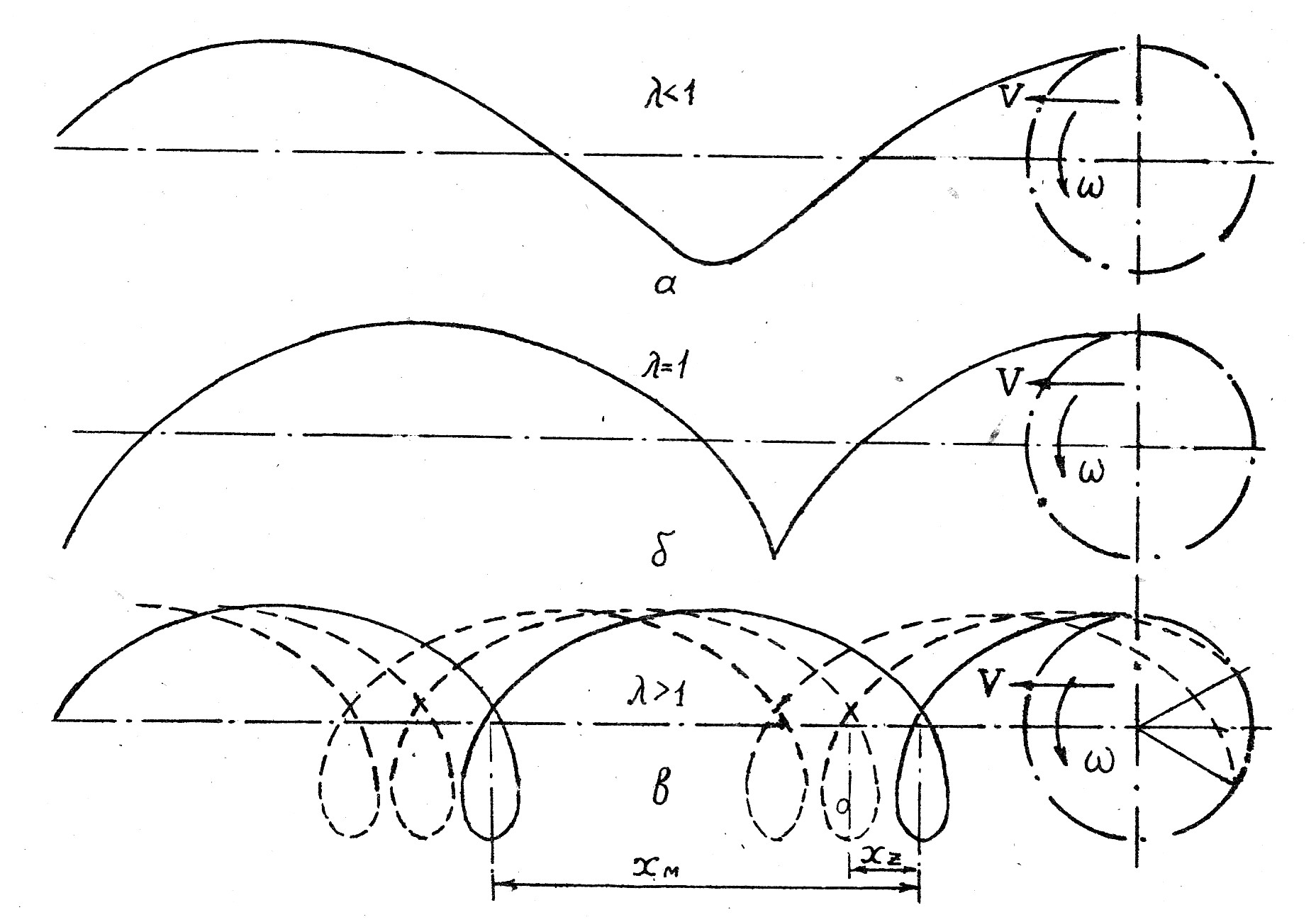
| Рис. 4. Траектория движения точек конца планки мотовила при различных l |
В случаях (а) и (б) планка не может подводить к режущему аппарату стебли растений, а, следовательно, мотовило не может оказаться работоспособным.
При удлиненной циклоиде - трохоиде (в) на участке A1B (рис. 3) планки мотовила подводят стебли к режущему аппарату. Таким образом, чтобы мотовило было работоспособным, необходимо выполнение условия l > 1. Когда жатка работает на обычной скорости (VM = 4...6 км/ч), кинематический коэффициент стремятся установить в пределах 1,5...1,7.
На повышенных значениях VM коэффициент к приходится снижать до 1,2...1,4, так как иначе может происходить выбивание планкой зерен из колоса.
При уборке полеглых культур частоту вращения необходимо увеличивать до l=2...2,3. Скорость машины при этом уменьшают так, чтобы линейная скорость планки не превышала допустимого значения по условию невымолота зерен -
 .
.
Высоким значением l, пользуются при настройке кормоуборочных машин, так как опасность выколачивания зерен в этом случае отсутствует. Для изменения частоты вращения в системе механизма привода мотовила устанавливают обычно клиноременные вариаторы, управляемые из кабины комбайна. С изменением l меняется и другая характеристика кинематики планок - шаг мотовила:
xz = xм/z = 2p×R/(l × z), (3)
где z - число планок;
хм - путь, пройденный машиной за время одного полного оборота мотовила
хм = 2pR/l,
так как машина пройдет путь в l, раз меньший, чем планка.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2711; Нарушение авторских прав?; Мы поможем в написании вашей работы!