КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механизмы привода режущих аппаратов и их характеристика
|
|
|
|
2.2.1. Кривошипно-шатунный механизм
Привод ножа у большинства уборочных машин осуществляется кривошипно-шатунным механизмом. Встречаются различные виды этого механизма: плоский ‑ у зерноуборочных комбайнов, пространственный ‑ у косилок, так как брус косилки может совершать колебания не только в вертикально-поперечной плоскости, но и в горизонтальной (до начала работы носок наружного башмака выносят вперед относительно внутреннего). Кроме того, кривошипно-шатунные механизмы делят на центральные (аксиальные), когда ось кривошипного вала лежит на линии движения ножа, и смещенные (дезаксиальные), у которых ось кривошипного вала располагают выше линии движения ножа.
В последнее время для привода режущих аппаратов начали применять и ряд других механизмов: качающуюся шайбу, качающуюся вилку (рис. 2), планетарный механизм, гидропривод, некруглые зубчатые колеса и др.
Применение новых механизмов чаще всего связано со стремлением уменьшить вибрацию машины, возникающую от возвратно-поступательного движения ножа, за счет уменьшения ускорения движущихся масс.
Для обоснования применимости того или иного механизма привода ножа прежде всего необходимо провести анализ кинематических характеристик, таких, как величины перемещений, скоростей и ускорений режущего аппарата в различные моменты процесса резания.
Наиболее простым механизмом, как с точки зрения устройства, так и метода математического описания работы, является плоский центральный кривошипно-шатунный механизм (рис. 2).
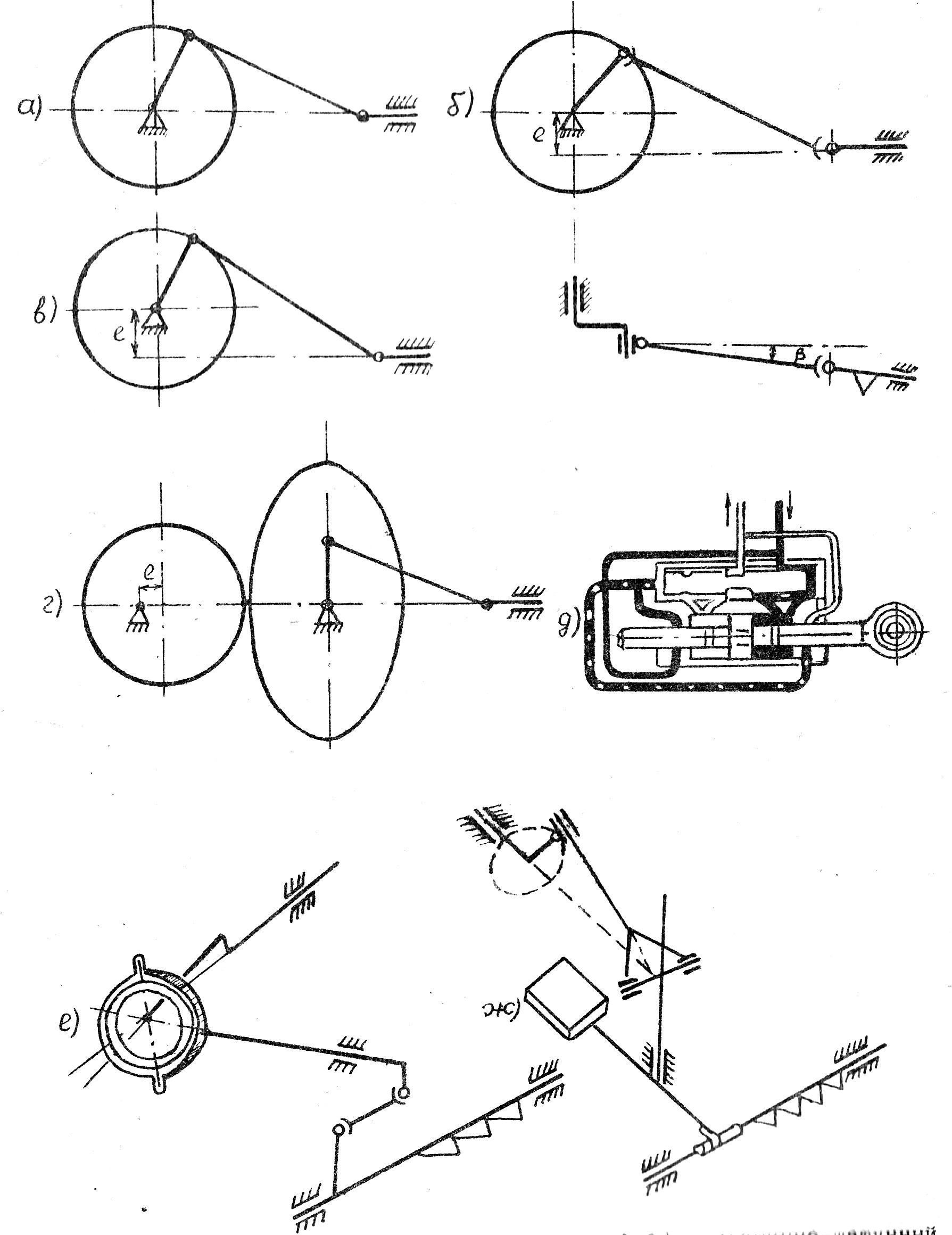
| Рис. 2. Механизмы привода ножа: а ‑ кривошипно-шатунный аксиальный плоский; б ‑ кривошипно-шатунный дезаксиальный пространственный; в ‑ кривошипно-шатунный дезаксиальный плоский; г ‑ с некруглыми зубчатыми колесами; д ‑ гидравлический; е ‑ качающаяся шайба; ж ‑ качающаяся вилка |
При малом значении отношения радиуса кривошипа r к длине шатуна l движение ножа может быть описано уравнениями гармонического колебания:
 ;
;
 ;
;
 . (2)
. (2)
Максимальное значение скорости ножа соответствует окружной скорости кривошипа:
 ,
,
а ускорение
| Рис. 3. Кинематические характеристики ножа |
Как уже было отмечено, скорость ножа имеет большое технологическое значение. Если скорость ножа мала, срез затруднен, а растения затягиваются в зазор между сегментом и вкладышем пальца. Это явление может иметь место в момент разгона и остановки ножа в каждом цикле колебания. Чтобы устранить этот недостаток, пальцы у большей части аппаратов располагают достаточно редко, чтобы нож к моменту начала резания уже прошел определенный путь xi (рис. 4) и успел разогнаться до необходимой скорости.
Для определения скорости начала и конца резания у пальцев режущего аппарата уравнение (2) лучше представить в функции от перемещения ножа х, а не угла поворота кривошипа w • t.
Из первого уравнения можно найти величину
 .
.
| Рис. 4. График скоростей ножа в зависимости от перемещения |
По величине cos wt легко определится синус этого угла:
 .
.
Подставляя sin wt в выражение для Vx, можно получить
 . (3)
. (3)
Аналогично находят и уравнение для определения ускорения:
 . (4)
. (4)
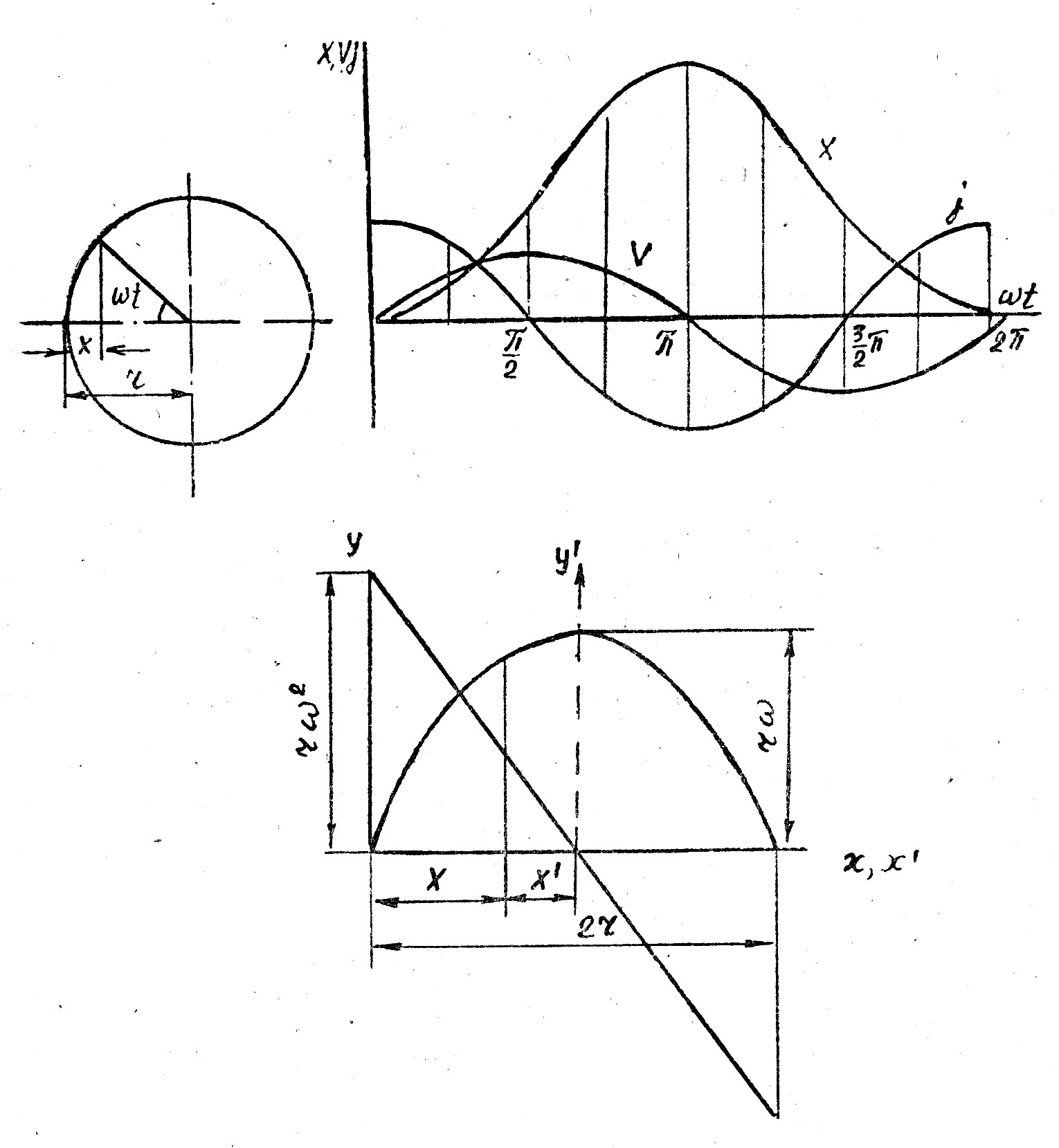
Графически зависимости (3) и (4) представлены на рис. 3, причем ускорение меняется в этих координатах по линейной зависимости, а скорость ‑ в определенном масштабе по дуге окружности.
В самом деле, если рассмотреть величину
у = Vx/w
(часто говорят, что это скорость ножа в масштабе w), то
 ;
;
у2 = 2rх‑ х2;
х2 + у2 = 2rх.
Если центр координат графика y¢ = Vx/w перенести на расстояние r вправо от исходного положения ножа (точки А0), т. е.
х' = r ‑ х,
то
(r - х')2 + (у¢)2 = 2r(r - х');
r2 – 2rх' + (х')2 + (у¢)2 = 2r2 – 2rх'; (х')2 + (у¢)2 = r2;
иначе говоря, в новой системе координат получена окружность радиусом r.
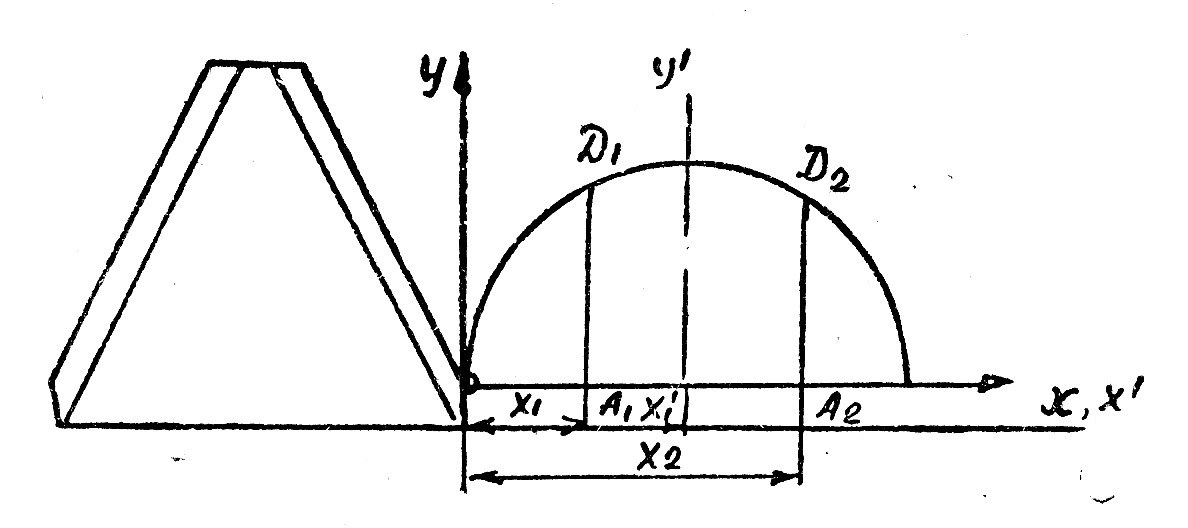
Построение такой окружности используют при графическом определении скорости ножа при любом перемещении, заданном величиной х или х' (рис. 4).
Таким образом, скорость ножа в период резания является величиной переменной, изменяющейся в довольно широких пределах. Так как в основном стебли перерезаются сегментом у кромки пальцев, то скорость резания будет зависеть от шага размещения сегментов и пальцев, т. е. от типа анализируемого режущего аппарата.
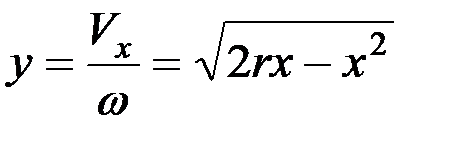
Известно, что в зависимости от соотношения шага режущей и противорежущей частей аппараты подразделяют на несколько типов (рис. 5). Прежде всего это аппараты нормального резания: однопробежные, где t = t0 = S (рис. 5а), двухпробежные, у которых S = 2t = 2t0, низкого резания, когда S = t = 2t0, и среднего резания, при S = t = 4t0/3.
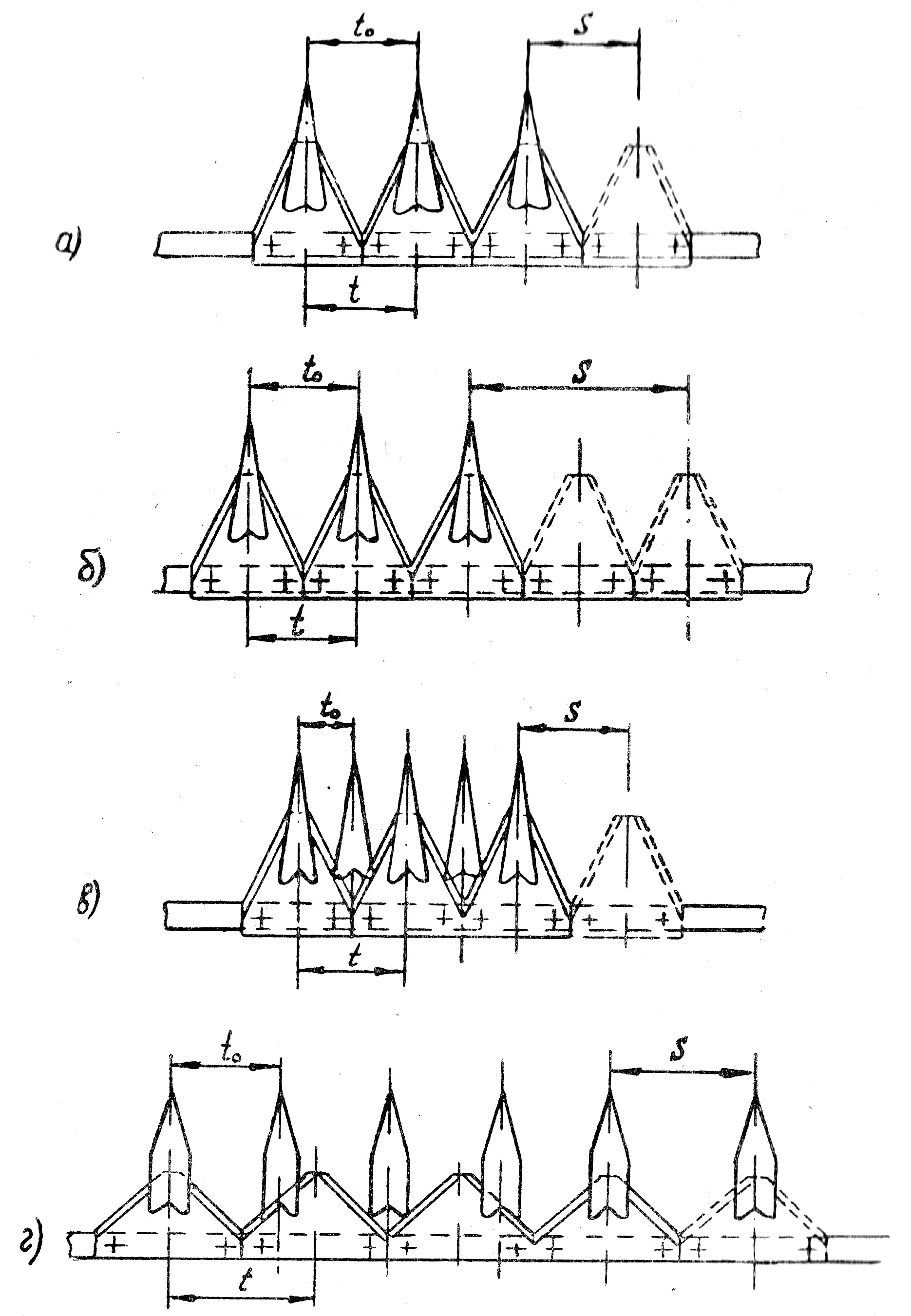
У аппарата нормального резания (однопробежного) скорость начала резания определится величиной хода ножа хн (рис. 6), когда нижняя рабочая точка лезвия А (перемещающаяся перед упорным отростком пальца) коснется противорежущей пластины в точке А1 На рис. 6а видно, что
|
|
|
|
|
Рис. 5. Типы режущих аппаратов
Рис. 6. Определение скоростей ножа в моменты начала и конца резания
 . (5)
. (5)
Конец резания наступит тогда, когда вершина лезвия (точка В0) подойдет к кромке пальца и окажется в точке В2:
 . (6)
. (6)
Для двухпробежного аппарата перемещение ножа в момент начала резания у среднего пальца х1н равняется
 . (7)
. (7)
В момент начала резания у крайнего пальца это расстояние увеличится на шаг размещения пальцев, т. е.
 . (8)
. (8)
В момент конца резания у среднего пальца
 , (9)
, (9)
а у крайнего пальца
x 2к = 2 t 0 - (b + b 1)/2. (10)
У аппарата низкого резания (рис. 6б) в момент начала резания у среднего пальца, как в предыдущих случаях,
 , (11)
, (11)
а у крайнего пальца
x 2н = t - (а + а 1)/2. (12)
В момент конца резания у среднего пальца
x lк = t 0 - (b + b 1)/2, (13)
а у крайнего пальца
x 2к = t - (b + b 1)/2. (14)
Для аппаратов среднего резания характерными оказываются следующие соотношения:
 ; (15)
; (15)
x 2н = 2 t 0 – t – (а + а 1)/2; (16)
 ; (17)
; (17)
x 2к = 2 t 0 – t – (b + b 1)/2. (18)
Подставляя найденные значения хн и хк в уравнение (3), можно найти величину скорости начала и конца резания растений аппаратами различных типов.
В контрольном примере произведен расчет скорости начала и конца резания для всех типов режущих аппаратов с возвратно- поступательным движением ножа. Исходные данные учитывают особенности размеров каждого типа аппарата.
Анализ результатов показывает, что у режущих аппаратов, с приводом от кривошипно-шатунного механизма наблюдается значительная разница между скоростью Vmax в середине хода и в граничных точках участка резания. Поэтому требуемую для резания скорость (2,8....3 м/с) не всегда удается обеспечить на протяжении всего процесса резания.
В то же время стремление обеспечить требуемую технологией резания скорость ножа в период среза всех растений приводит к завышению ее в середине хода и особенно к росту ускорений и связанных с ними сил инерции. Изыскание оптимальных кинематических диаграмм скорости и ускорения ножа, соответствующих одному его ходу, сводится к нахождению функции скорости с максимальным значением на участке резания и минимального значения функции ускорения на всем участке движения. Такая задача вариационного типа была решена следующим образом: рациональный привод ножа должен обеспечить кинематический режим, при котором график изменения скорости лезвия имеет вид равнобедренной трапеции (скорость ножа на всем участке резания остается постоянной, а ускорение минимально).
На рис. 7 построены оптимальные кинематические диаграммы перемещений x = f(wt), скоростей V = f(wt) и ускорений
j = f(wt), соответствующие одному обороту ведущего звена.
Наряду с кривошипно-шатуппым механизмом (см. рис. 2), для привода режущего аппарата применяются механизмы качающейся шайбы, качающейся вилки, некруглые зубчатые колеса и т. д. Анализ кинематических характеристик этих механизмов можно провести в сравнении с рассмотренным уже кривошипно-шатунным с точки зрения степени приближения их к оптимальному виду (программа «Резание» (Rezanie)).
| Рис. 7. Оптимальные кинематические диаграммы ножа |
2.3. Диаграмма движения сегмента
Сегмент режущего аппарата участвует в сложном движении. Оно складывается из относительного движения (уравнение 2.22) и переносного вместе с машиной со скоростью VM, определяемого уравнением
у = Vм × t. (19)
Путь, проходимый за один ход ножа или за половину оборота кривошипа, называется подачей и определяется, как
 , (20)
, (20)
где Т ‑ период колебания ножа; п ‑ частота колебаний.
Из уравнения (2.62) можно получить
 . (21)
. (21)
Подача h может явиться и характеристикой w, а еще точнее - отношения w/VM:
 . (22)
. (22)
Из уравнения переносного движения (19) получают
t = у /Vм.
Подставляя t в уравнение относительного движения ножа (22), находят закономерность движения сегмента:
 . (23)
. (23)
Следовательно, траектория любой точки ножа представляет собой косинусоиду.
Если из характерных точек (вершины и основания) сегмента провести косинусоиды при прямом и обратном ходе ножа, то поверхность поля покроется площадками, по которым пробегают рабочие лезвия ножей. В сочетании с траекториями движения пальцев (а это ‑ прямые линии, отстоящие от оси пальцев на расстоянии b и параллельные оси у) эти площадки представляют собой диаграмму движения сегмента (рис. 8).
Как видно из рис. 8, не вся поверхность поля пробегается лезвиями ножа. Незаштрихованный участок от точки Е до F не попадает в зону траекторий точек лезвия. Стебли, расположенные на этой площадке, будут отогнуты вперед противорежущим брусом и окажутся срезанными в точке F при обратном движении сегмента. Иначе говоря, стебли на участке от точки Е до F будут срезаны после продольного отгиба. Максимальная величина отгиба qпрод равна отрезку EF. Если учесть, что нож расположен на высоте Н от поверхности поля, то высота стерни Lпрод может быть определена по теореме Пифагора:
 . (24)
. (24)
На заштрихованном участке траектории лезвия стебли будут наклонены движущимся сегментом в сторону и окажутся перерезанными у противорежущей кромки ближайшего пальца. Этот отгиб называют поперечным. Максимальная величина поперечного отгиба может быть представлена в виде отрезка MN, если стебель, находящийся в точке М, пальцем будет отклонен влево по ходу движения машины. Если учесть, что стебель обладает некоторыми упругими свойствами, то можно предположить возможность его скольжения относительно лезвия. В этом случае отгиб стебля произойдет под минимально возможным углом Qmin к оси х.
| Рис. 8. Диаграмма движения сегмента |
Поскольку движение сегмента может быть описано, как
 ,
,
то угол наклона касательной к траектории по отношению к оси х окажется равном
Наименьшее значение угла Qmin окажется при wt = p/2, значит, tg Qmin = VM/(rw).
Если учесть, что по уравнению (22)
 ,
,
то
 (25)
(25)
После определения Qmin нахождение длины отрезка MN и Lпопер не составляет труда,
 .
.
В свою очередь,
 .
.
Тогда
 . (26)
. (26)
Высота стерни после поперечного отгиба будет равна
 . (27)
. (27)
Величина продольного отгиба может быть определена аналитически:
 . (28)
. (28)
По уравнению (23),отнесенному к осям х и у,
 .
.
Прямая KN, проведенная параллельно оси у на расстоянии
х1 = r+b,
пересечет косинусоиду в нескольких точках, в том числе и в точке F:
 ,
,
 .
.
Срез растений в точке F произойдет, когда вал кривошипа повернется на угол
p < wt < 1.5p,
т. е. wt будет в третьей четверти угла поворота. Из тригонометрии известно, что в третьей четверти для любого произвольного угла a
 .
.
Для рассматриваемого случая это будет означать
 ,
,
тогда
 .
.
Учитывая, что xF = x 1 = r + b, можно получить
Отсюда
 ,
,
т. е.
 . (29)
. (29)
Чтобы определить координату уЕ точки Е, необходимо заметить, что ветвь косинусоиды СЕ является такой же, что и косинусоиды, выходящей из начала координат О, но сдвинутой вверх на высоту сегмента h' и вправо на r+b', где b' ‑ половина верхнего основания сегмента. Если за начало этой косинусоиды принять точку О', то косинусоида СЕ будет записана в той же форме, что и выходящая из точки О, т. е.
 .
.
Координата у¢Е, очевидно, найдется для того значения х¢Е, которое соответствует удалению кромки KN пальца от оси о'у:
 ,
,
тогда
 ,
,
 ,
,
Учитывая, что
yE = yE + h/,
можно найти
 ,
,

или
 . (30)
. (30)
Высота стерни после продольного отгиба определяется так:
 . (31)
. (31)
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 4829; Нарушение авторских прав?; Мы поможем в написании вашей работы!