КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обоснование формы сегментов режущих аппаратов с возвратно-поступательным движением ножа
|
|
|
|
Форма сегментов определяется прежде всего углом наклона лезвия к направлению движения. Величина этого угла оказывает влияние на усилие.сопротивления срезу. С увеличением угла усилие среза уменьшается, но при определенном его значении стебель может выскальзывать из раствора режущей пары. Предельный угол выскальзывания стебля называется углом защемления. Угол защемления зависит от коэффициентов трения стеблей о лезвия.
На рис. 9 изображено сечение стебля в створе сегмента с углом наклона лезвия a и противорежущей пластинки b. При резании стебля возникают нормальные составляющие сил сопротивления N1 и N2, под действием которых стебель будет стремиться выскользнуть из створа лезвия.
Препятствовать выскальзыванию будут силы трения F1 и F2, действующие вдоль лезвий:
F1 = N1tgj1;
F2 = N2tg j2,
где j1 и j2 ‑ соответственно угол трения стебля о противорежущую пластину и лезвие сегмента.
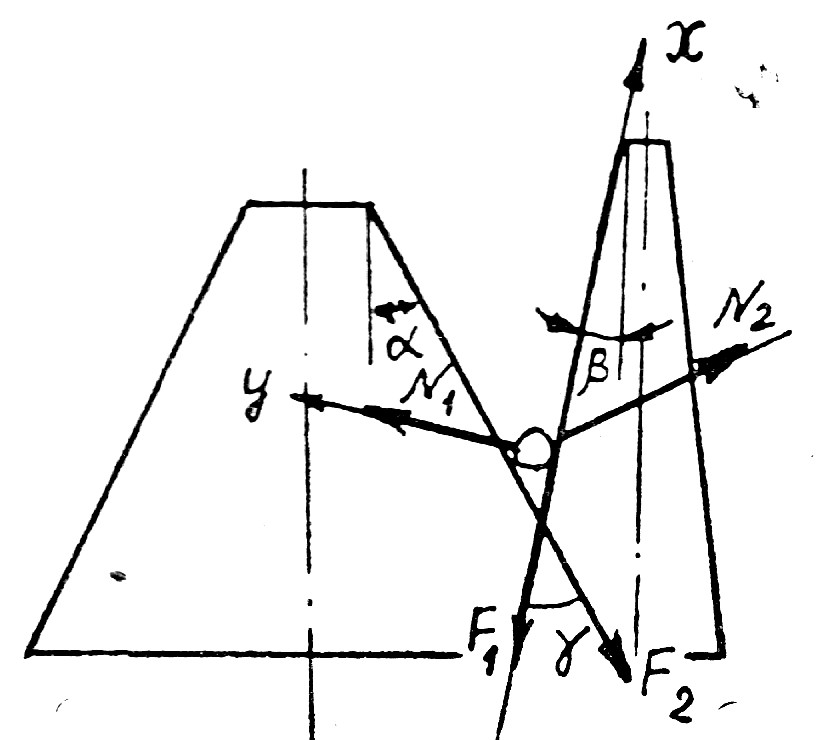
| Рис. 9. Схема сил, действующих на стебель при резании |
Угол между активным и пассивным лезвиями обозначим g:
 .
.
Условием статического равновесия стебля будут равенства:
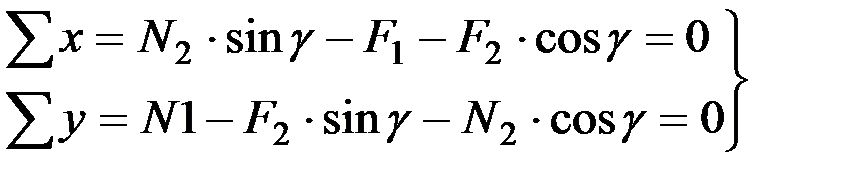 . (32)
. (32)
Чтобы выскальзывания не было, необходимо
 ,
,
или
 (33)
(33)
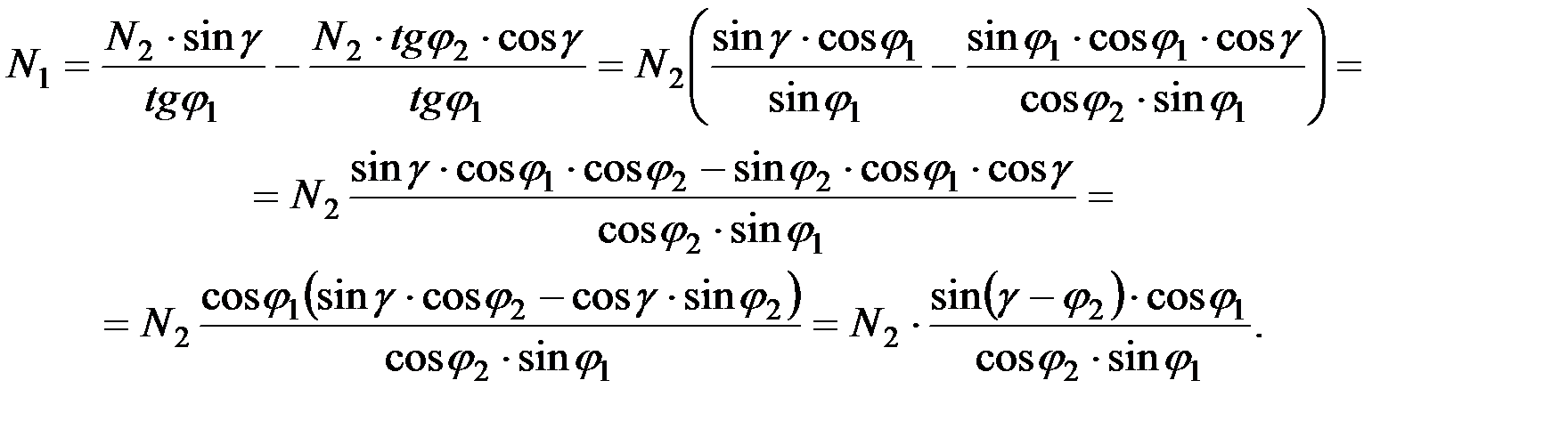
Из второго уравнения системы (2.74) можно получить
 . (34)
. (34)
Приравнивая значения N1 из уравнений (33) и (34), получают
 .
.
После незначительных преобразований это равенство можно представить, как
 ,
,
откуда
 .
.
Таким образом, выскальзывания не произойдет, если
 (35)
(35)
Но угол g = a + b тогда
 . (36)
. (36)
У гладких лезвий выскальзывание становится заметным при a» 30°. Насеченные лезвия лучше удерживают стебли, и выскальзывание у них наблюдается при углах наклона порядка 45...50°. Угол трения растений о режущие кромки зависит и от степени остроты лезвий: при острых выскальзывание менее вероятно, чем при тупых.
2.5. Анализ работы аппаратов для бесподпорного среза растений
Наряду с аппаратами, осуществляющими срез растений при возвратно-поступательном движении ножа, в последние годы широкое распространение получили ротационные косилки, у которых ножи располагают на дисках, вращающихся вокруг вертикальной оси.
Пусть ротор режущего аппарата имеет диаметр D = 2 R и прямолинейные лезвии длиной l.
В процессе работы ножи 1 и 2 (рис. 10) совершают сложное движение: вращаются вместе с дисками и перемещаются по полю с машиной со скоростью Vм.
| Рис. 10. Кинематические параметры ротационно-дискового аппарата |
В произвольный момент времени t центр диска переместится в точку O1, передвинувшись вдоль оси х на величину x = VMt.
В то же время диск повернется на угол wt. Уравнения движения точек А и В лезвия в параметрической форме примут вид
 , (37)
, (37)
 , (38)
, (38)
Этим уравнениям соответствуют траектории AA1A2 и BB1B2, между которыми лезвие ножа 1 срезает растения. Нож 2 движется по траектории CC1C2 и DD1D2. В зонах, где траектории крайних точек соседних ножей перекрываются, происходит повторный пробег ножом срезанной площади (заштриховано крестообразно). Если траектория CC1C2 расположена впереди BB1B2, то на площадке EC1E1 (на рисунке заштриховано) растения будут срезаны после продольного отгиба.
Уравнения (37) и (38) описывают циклоидальную кривую ‑ трохоиду.
Скорость ножа в произвольный момент времени определится ее составляющими Vx и Vy:
 ,
,
 ,
,
 ,
,
тогда
 ,
,
 .
.
Поскольку предельные значения cos wt равны ±1, то
Vmax = Rw + VM; (39)
Vmin = Rw - VМ. (40)
Число ножей на диске ротационной косилки регулируют. При малой скорости движения машины по полю VM оставляют один нож, чтобы исключить или во всяком случае уменьшить площади участков, повторно пробегаемые ножом, и тем самым снизить затраты энергии на процесс резания. Если скорость VM высокая, то необходимо ставить второй нож, так как иначе срез будет происходить с отгибом стеблей вперед по ходу движения машины.
За время полного поворота диска машина пройдет путь
h = VMT = VM2p/w, (41)
где Т - время одного оборота диска.
Величина подачи (пути, проходимого машиной за один ход ножа) составит
h1 = VМ × 2p/(Zw),
где Z - число ножей на диске.
Чтобы предотвратить возможность продольного отгиба стеблей диском, необходимо выполнить соотношение
 .
.
Число необходимых ножей на диске может быть найдено как
 , (42)
, (42)
где INT ‑ функция, определяющая целую часть аргумента.
Так, для косилки КРН-2,1 при R = 0,295 м и l = 0,1 м, используют один нож, если скорость не превышает 10 км/ч.
Если косилка работает на более высокой скорости, то необходимо установить два ножа на каждый диск.
2.6. Расчет мощности, необходимой для привода режущего аппарата
Сила Р, необходимая для перемещения ножа, должна преодолеть сопротивление срезу растений РСр, силу инерции ножа Pj и трения F:
P = Pcр + Pj + F. (43)
Сила сопротивления срезу зависит от числа растений, перерезаемых ножом, и их состояния.
На основе экспериментальных данных установлено, что для зерновых культур работа e, затрачиваемая на срез растений с 1м2, составляет 10…200 Дж, а для трав e = 200…300 Дж.
Работа, необходимая для резания всем ножом, определяется по формуле
Aср = e × F1, (44)
где F1 ‑ площадь поля, с которой срезаны растения за один ход ножа, ‑
F1 = h × В, (45)
где h ‑ величина подачи на нож;
В ‑ ширина захвата косилки.
Средняя сила среза может быть определена, как
Рср = Аср/ хр, (46)
где хР ‑ перемещение ножа от начала до конца резания.
Сила инерции ножа.определяется величиной массы mм и ее ускорением jн, т. е.
Pj = mн × jн. (47)
Максимальное значение силы инерции будет равно
Pjmax = mн × w2R. (48)
Величина массы ножа может быть представлена как
mн = m0 • В, (49)
где m0 ‑ масса 1 м ножа 1,74 кг.
Сила трения ножа об элементы пальцевого бруса определяется его весом и давлением шатуна (рис. 11).
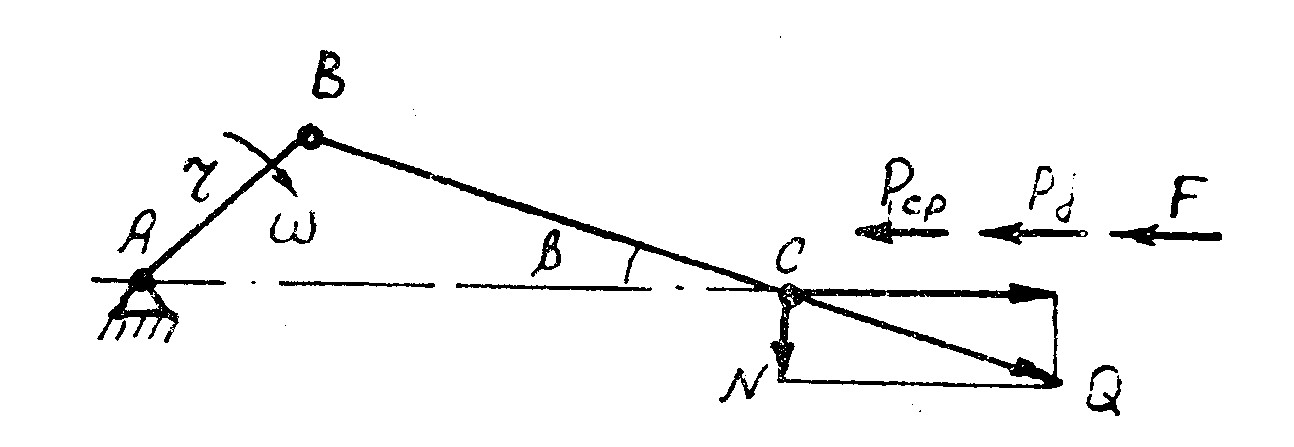
| Рис. 11. Силы, действующие на нож |
F = f×mн×g + N×f,
где f ‑ коэффициент трения;
g ‑ ускорение силы тяжести.
Учитывая, что трущаяся пара нож ‑ пальцевый брус работает в абразивной среде, коэффициент трения можно принять достаточно высоким (0,25... 0,3).
Нормальная составляющая (рис. 11)
N= (Pcp + Pj + F) × tgb,
или
N= (Pcp + Pj + f×mн×g + fN) ×tgb,
 .
.
Тогда сила трения
 . (50)
. (50)
Окончательно общее усилие, необходимое для передвижения ножа, с учетом уравнений (43), (44), (48) и (50) будет равно
 . (51)
. (51)
Мощность, необходимая на привод ножа,
N = P×Vcp, (52)
где Vср ‑ средняя скорость ножа,
Vср =:2r×w/p. (53)
У ротационно-дискового режущего аппарата затраты мощности определяются главным образом сопротивлением стеблей срезу. В первом приближении можно пренебречь силами инерции, которые могут возникать при неравномерном вращении роторов, и силами трения в подшипниках роторов, а также трением ножей и дисков о стерню.
Дополнительно для роторов косилки могут быть определены: крутящий момент на роторе ‑
M = Pcp × h × R, (54)
суммарный момент, приведенный к ВОМ,‑
Nсум =М×Z×nд/nвом, (55)
где nд ‑ частота вращения диска;
nвом ‑ частота вращения вала отбора мощности;
Z ‑ число роторов на косилке
и суммарная мощность привода режущего аппарата ‑
Nсум = Мсум×wвом/102, (56)
если мощность представить в киловаттах.
Затраты мощности на привод роторных косилок обычно бывают выше, чем у косилок с возвратно-поступательным движением ножа.
Более детальное изложение процесса резания растений при кошении, в том числе при использовании различных механизмов привода ножа, изложено в [1], [2], [3].
Пример числового анализа того или иного режущего аппарата можно осуществить по программе «Rezanie»на ЭВМ.
Литература
1. Б.Г. Турбин и др. Сельскохозяйственные машины. Л.: Машиностроение, 1967, - 583 с.
2. А.Ф. Кошурников и др. Анализ технологических процессов, выполняемых сельскохозяйственными машинами, с использованием ЭВМ. Часть 2. Пермь, 1998, - 370 с.
3. Н.И. Кленин и др. Сельскохозяйственные машины. М.: КолосС, 2008, - 816 с.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2137; Нарушение авторских прав?; Мы поможем в написании вашей работы!