КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методом сил
|
|
|
|
Рамой называется стержневая конструкция, состоящая из двух и более элементов, соединённых между собой и с основанием жёстко, шарнирно-неподвижно или шарнирно-подвижно (рис. 5.1). Такого рода конструкции нашли широкое распространение в машиностроении, в гражданском и промышленном строительстве, играя роль несущих каркасов машин, зданий и сооружений. По характеру восприятия элементами конструкций внешних нагрузок различают:
а) плоские рамы, когда все стержни и нагрузки расположены в одной плоскости;
б) плоско-пространственные рамы, когда силовая и конструктивная плоскости взаимно ортогональны (перпендикулярны);
в) пространственные рамы, когда стержни и нагрузки расположены произвольным образом.
Рамы бывают статически определимые и статически неопределимые. Рассмотрим класс плоских статически неопределимых рам, обобщающим показателем сложности расчёта которых является их степень статической неопределимости. На рис. 5.1 показан пример такой рамы.
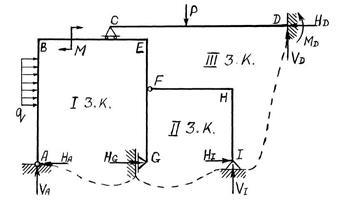
| B, E, D, H – жёсткое соединение дисков; A, F, I – шарнирно-неподвижное соединение дисков; C, G – шарнирно-подвижное соединение дисков. |
Рис. 5.1. Плоская статически неопределимая рама
Степень статической неопределимости рамы можно вычислить на основе понятия этой величины по формуле
 , (5.1)
, (5.1)
где R – число опорных реакций и линейно независимых от них внутренних усилий во всех стержнях рамы; U – общее число уравнений равновесия, которые можно составить для всей рамы в целом или отдельных её частей. Рассматриваемая рама (рис. 5.1) имеет восемь опорных реакций. Используя метод сечений, можно выразить внутренние усилия (N, Q, M) в любом элементе этой рамы через внешние нагрузки (M, P, q) и опорные реакции. Следовательно,  .
.
Общее число уравнений найдём следующим образом. Для всей рамы целиком можно составить три уравнения равновесия ( ,
,  ,
,  ); для части FHI можно составить одно дополнительное уравнение (
); для части FHI можно составить одно дополнительное уравнение ( – свойство шарнира); для части CD можно составить два дополнительных уравнения (
– свойство шарнира); для части CD можно составить два дополнительных уравнения ( ,
,  – свойство катка). Таким образом, общее число уравнений равновесия
– свойство катка). Таким образом, общее число уравнений равновесия  , а степень статической неопределимости равна
, а степень статической неопределимости равна  .
.
Рассматриваемую величину можно вычислить также по синтезированной формуле
 , (5.2)
, (5.2)
где К – число замкнутых контуров, образованных стержнями и основанием (опорным диском);  – число простых шарниров (
– число простых шарниров ( , где S – число сходящихся в шарнире стержней);
, где S – число сходящихся в шарнире стержней);  – число катковых (шарнирно-подвижных) соединений.
– число катковых (шарнирно-подвижных) соединений.
Для показанной на рис. 5.1 рамы получаем  (ABEGA; GFHIG; IHFECDI);
(ABEGA; GFHIG; IHFECDI);  (A; F; I);
(A; F; I);  (G; C). Следовательно,
(G; C). Следовательно,
 .
.
Одним из самых распространённых методов раскрытия статической неопределимости является метод сил. В его основе лежит умение определять перемещения любых сечений рам от произвольных нагрузок. За неизвестные в этом методе принимают опорные реакции и (или) внутренние усилия в “лишних” внешних и (или) внутренних связях, безусловно не необходимых для обеспечения кинематической неизменяемости заданной рамы. Сущность метода сил заключается в следующем:
1. На основе статического и кинематического анализа вычисляют степень статической неопределимости по формулам (5.1) и (5.2).
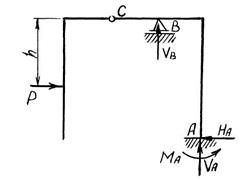
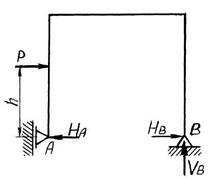
2. Выбирают так называемую основную систему метода сил путём отбрасывания n связей таким образом, чтобы оставшиеся U связей обеспечивали как статическую определимость, так и кинематическую (мгновенную) неизменяемость всей рамы и отдельных её частей. В принципе, основных систем можно выбрать несчётное множество. При выборе конкретного варианта обычно руководствуются: а) простотой и понятностью преобразования связей; б) наилучшим восприятием основной системой внешних нагрузок; в) авторским предпочтением тому или иному варианту. В любом случае, выбрав основную систему, необходимо провести её статический и кинематический анализ. Иногда случается так, что, выполнив формально отбрасывание n связей, получают механизм (рис. 5.2, а) или вырожденную систему (рис. 5.2, б), статическими признаками которых является противоречивость некоторых уравнений равновесия и невозможность вычисления реакций в отдельных опорных связях.
| 
|
| а) | б) |
 ; ;  ?! ?!  ; ;
 ? ?  ? ?
|  ; ?! ; ?!  ; ;
 ? ?  ? ?
|
Рис. 5.2. Псевдоосновные системы: а – механизм; б – вырожденная система
3. Рассматривают эквивалентную систему, получаемую путём загружения основной системы заданными внешними нагрузками  и неизвестными реакциями, соответствующими отброшенным связям, которые обозначают буквами
и неизвестными реакциями, соответствующими отброшенным связям, которые обозначают буквами  (i = 1, 2, …, n). На основе адекватности заданной и эквивалентной систем получают канонические уравнения, выражающие равенства нулю перемещений по направлению отброшенных связей от всех приложенных силовых факторов,
(i = 1, 2, …, n). На основе адекватности заданной и эквивалентной систем получают канонические уравнения, выражающие равенства нулю перемещений по направлению отброшенных связей от всех приложенных силовых факторов,
 (5.3)
(5.3)
где  – податливость основной системы, имеющая смысл перемещения по направлению i -й отброшенной связи от действия силы
– податливость основной системы, имеющая смысл перемещения по направлению i -й отброшенной связи от действия силы  , приложенной по направлению j -й отброшенной связи;
, приложенной по направлению j -й отброшенной связи;  – перемещение в основной системе по направлению i -й отброшенной связи от действия заданной внешней нагрузки . Указанные выше перемещения вычисляют согласно интегралу Мора перемножением “единичных” и грузовой эпюр внутренних усилий (изгибающих моментов) по правилу Верещагина и формуле Симпсона:
– перемещение в основной системе по направлению i -й отброшенной связи от действия заданной внешней нагрузки . Указанные выше перемещения вычисляют согласно интегралу Мора перемножением “единичных” и грузовой эпюр внутренних усилий (изгибающих моментов) по правилу Верещагина и формуле Симпсона:
 ;
;  , (5.4)
, (5.4)
где EJ – изгибная жёсткость поперечных сечений стержней рамы;  и
и  – “единичные” эпюры изгибающих моментов в основной системе от действия сил
– “единичные” эпюры изгибающих моментов в основной системе от действия сил  и ;
и ;  – грузовая эпюра изгибающих моментов от действия нагрузки .
– грузовая эпюра изгибающих моментов от действия нагрузки .
Правило Верещагина применительно к одному грузовому участку рамы формулируется следующим образом: произведение двух эпюр, хотя бы одна из которых прямолинейна, равно площади криволинейной эпюры умноженной на ординату прямолинейной эпюры, взятую под центром тяжести криволинейной эпюры (рис. 5.3):
 , (5.5)
, (5.5)
где  – площадь криволинейной эпюры;
– площадь криволинейной эпюры;  – ордината прямолинейной эпюры;
– ордината прямолинейной эпюры;  – центр тяжести эпюры .
– центр тяжести эпюры .
Формула Симпсона для одного грузового участка записывается в виде (рис. 5.3)
 , (5.6)
, (5.6)
где l – длина участка;  – левые ординаты эпюр;
– левые ординаты эпюр;  – средние ординаты эпюр;
– средние ординаты эпюр;  – правые ординаты эпюр.
– правые ординаты эпюр.
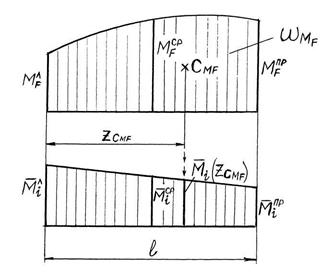
Рис. 5.3. Перемножение эпюр по правилу Верещагина и формуле Симпсона
4. После вычисления коэффициентов при неизвестных и свободных членов решают систему уравнений (5.3), в результате чего находят дополнительные неизвестные . Основные неизвестные вычисляют, используя принцип суперпозиции. Например, горизонтальная реакция в опоре А заданной рамы
 , (5.7)
, (5.7)
где  – реакция в основной системе от внешней нагрузки;
– реакция в основной системе от внешней нагрузки;  – реакция в основной системе от единичной дополнительной неизвестной
– реакция в основной системе от единичной дополнительной неизвестной  ; n – степень статической неопределимости заданной системы.
; n – степень статической неопределимости заданной системы.
Аналогично находят характерные значения эпюры изгибающих моментов в заданной системе:
 . (5.8)
. (5.8)
5. В заключение проводят проверочный или конструктивный расчёт на прочность, используя условие прочности при изгибе по нормальным напряжениям
 , (5.9)
, (5.9)
где М – расчётный изгибающий момент в наиболее опасном сечении рамы;  – осевой момент сопротивления расчётного сечения;
– осевой момент сопротивления расчётного сечения;  – допускаемое напряжение при растяжении или сжатии.
– допускаемое напряжение при растяжении или сжатии.
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 411; Нарушение авторских прав?; Мы поможем в написании вашей работы!