КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Начальный механизм и структурные группы
|
|
|
|
Решение.
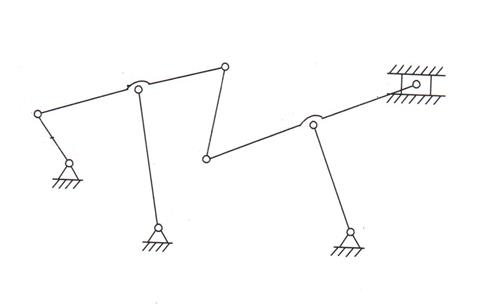
1. Вычерчиваем структурную схему механизма.
2. Определяем число звеньев механизма (включая стойку). Нумеруем все звенья, начиная с ведущего, арабскими цифрами 0, 1, 2, 3, 4. Стойке присваивают номер 0. Этот механизм преобразует вращательное движение звена 1 в возвратно-поступательное движение звена 5. Звено 1, таким образом, является входным (ведущим), а звено 5 – выходным (ведомым).
Составляем таблицу звеньев механизма.
Таблица 1.5. Звенья механизма
| Номер звена | Название | Вид движения | Особенности движения |
| стойка | отсутствует | – | |
| кривошип | вращательное | полный оборот | |
| шатун | плоскопараллельное | нет пар, связанных со стойкой | |
| коромысло | вращательное | неполный оборот | |
| шатун | плоскопараллельное | нет пар, связанных со стойкой | |
| ползун | поступательное | возвратное движение |
3. Установим число p кинематических пар механизма, а также класс и вид каждой пары. Обозначим все кинематические пары заглавными латинскими буквами (А, В, С, D, Е, F, R). Составим таблицу кинематических пар механизма.
Таблица 1.6. Кинематические пары механизма
| Обозначение пары | Звенья пары | Название | Класс |
| A | 0 - 1 | вращательная | |
| B | 1 - 2 | вращательная | |
| C | 2 - 3 | вращательная | |
| D | 3 - 4 | вращательная | |
| E | 4 - 5 | вращательная | |
| F | 5 - 0 | поступательная | |
| R | 3 - 0 | вращательная |
4. Вычислим число W степеней свободы механизма (по формуле П. Л. Чебышева).
W = 3·n – 2·p1 – p2 = 3·5 – 2·7– 0 = 1, где
n = 5 – число подвижных звеньев механизма,
р1 = 7 – число одноподвижных кинематических пар (низших пар),
p 2 = 0– число двухподвижных кинематических пар (высших пар).
Механизм имеет одну степень свободы, следовательно, положения всех звеньев определяются одной обобщенной координатой. В качестве таковой выберем угловую координату φ кривошипа 1, т. е. примем кривошип 1 за начальное звено, которое изобразим отдельно.
5. Разделим схему механизма на начальный (первичный) механизм (рис. 18) и ведомую цепь, состоящую из структурных групп. Оставшуюся после выделения из механизма стойки и начального звена кинематическую цепь разложим на две структурные группы, изображённые на рис. 19: группа, состоящая из звеньев 2-3, группа, состоящая из звеньев 4-5.

рис.18
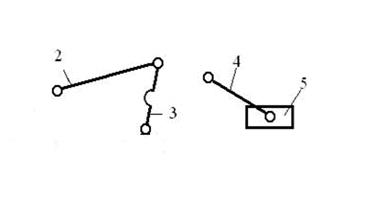
Рис.19
6. Определим класс и порядок группы.
Обе структурные группы относятся ко второму классу. Порядок каждой структурной группы – второй.
7. Определяем класс и порядок механизма по классу и порядку старшей структурной группы, входящей в его состав. Данный механизм второго класса, второго порядка.
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОГО РЕШЕНИЯ
СОДЕРЖАНИЕ ЗАДАНИЯ
В задании «Структурный анализ механизма» исследуют строение механизма по заданной схеме.
Схема механизма задается.
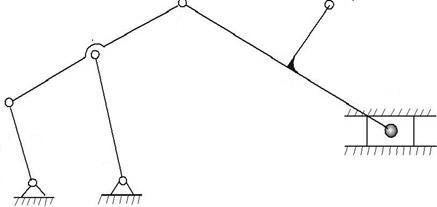
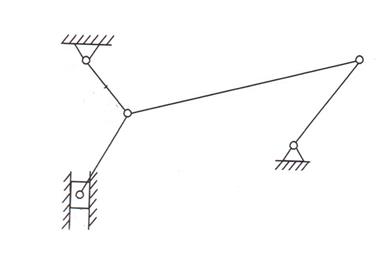
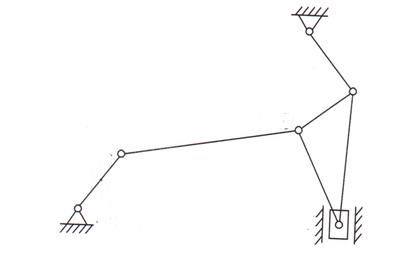
ЗАДАЧА. Исследовать строение механизма по заданной схеме.
Примечание:
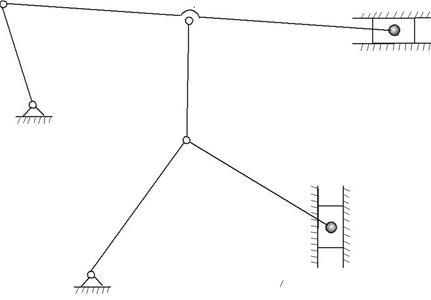
Номер схемы и ведущее звено указываются преподавателем (рис. 20).
1.
|
2.
|
3.
|
Рис. 20. Схемы к заданию «Структурный анализ механизма»
4.
|
5.
|
Рис. 20. Схемы к заданию «Структурный анализ механизма» (продолжение)
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 1342; Нарушение авторских прав?; Мы поможем в написании вашей работы!