КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Передаточное число и передаточное отношение тягового привода
|
|
|
|
Силы, возникающие при работе тягового привода III класса
Динамика тягового привода II класса с учетом вертикальных перемещений рамы тележки.
Динамика тягового привода II класса без учета вертикального перемещения подрессоренных масс тележки.
Силы, возникающие при работе тягового привода II класса
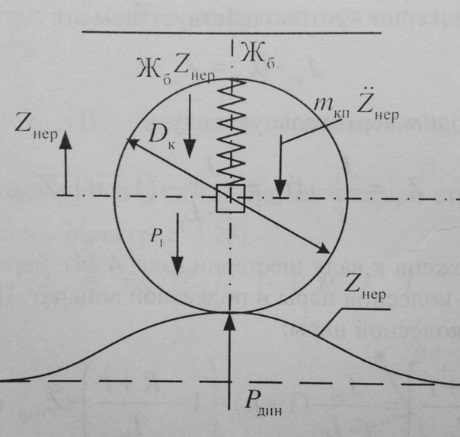
Динамика привода 1 класса
Силы, возникающие в приводе 1 класса при работе тягового двигателя.
Рассмотрим силы, возникающие в отдельных элементах и узлах привода при движении локомотива с равномерной скоростью по абсолютно ровному пути, при установившемся режиме движения. В этих условиях электромагнитный момент на валу якоря (Мдв = const) и передаточное отношение (µ=  ) редуктора остаются постоянными.
) редуктора остаются постоянными.
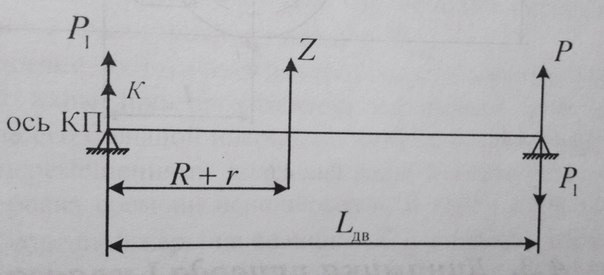
На зубцы зубчатого колеса со стороны шестерни будет действовать вертикальная сила Z,направленная вниз. Приведем ее к центру оси колесной пары, приложив здесь две равные и противоположно направленные силы Z.
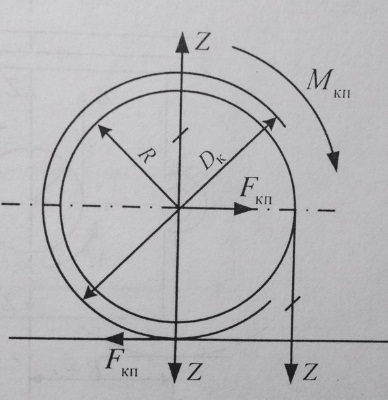
Вращающий момент КП Мкп=Z*R удобно выразить через касательную силу тяги:
 , кН*м.
, кН*м.
Вертикальная сила Z, приложенная к оси колесной пары в плоскости зубчатого колеса:
Рассмотрим силы, действующие на корпус тягового двигателя.
Со стороны зубцов зубчатого колеса действует вертикальная реакция, равная по величине силе Z, но направленная вверх.
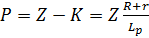
Приведем ее к центру вала якоря, приложив здесь две равные и противоположно направленные силы Z. Получаем пару сил с моментом Мкп=Z*R и вертикальную силу Z, приложенную к валу якоря и передающуюся на корпус двигателя через якорные подшипники. Силу Z можно представить в виде двух составляющих К и Р, соответственно разгружающих колесную пару и подвесной аппарат:
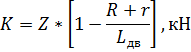
Где  – радиус шестерни, м.
– радиус шестерни, м.
Сила К приложена к оси колесной пары в месте установки моторно-осевых подшипников.
Далее находим Р:
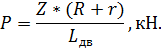
Сила Р приложена к поперечному креплению рамы тележки в месте установки подвесного аппарата.
Вращающий момент  Этот момент можно представить в виде пары сил.
Этот момент можно представить в виде пары сил.
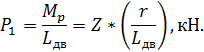
В результате на ось колесной пары действует вертикальная сила:

Где  – диаметр круга катания движущего колеса.
– диаметр круга катания движущего колеса.  - база тягового двигателя.
- база тягового двигателя.  - сила тяги, реализуемая одной движущей колесной парой.
- сила тяги, реализуемая одной движущей колесной парой.
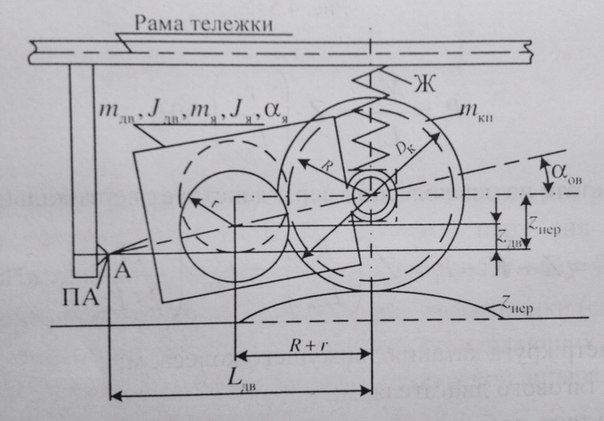
h – глубина неровности.
Угловая частота вертикальных перемещений:

Центр колеса перемещается относительно центра шестерни на величину Z=Zнер-Zдв.
Это ведет к перекатыванию шестерни по зубчатому колесу и повороту якоря на угол: αя=(R+r)*αдв/r=(1+u)*αдв, где u=R/r – передаточное число редуктора.
Полное давление на путь КП: Рполн=Рдин+Рстатич
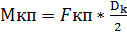
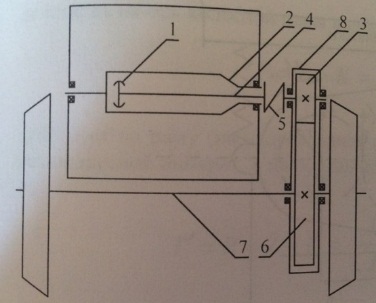
Рассмотрим ТП 2 класса, характеризуемый опорно-рамным подвешиванием ТЭД и опорно-осевым подвешиванием редуктора. Принципиальная схема ТП 2 класса с зубчатой муфтой 1, расположенной внутри полого вала якоря 2. Вращающий момент от якоря к валу малой шестерни 3 тягового редуктора передается посредством торсионного вала 4 и эластичной дисковой резинокордной муфты 5. Зубчатое колесо редуктора 6 жестко закреплено на оси КП 7, корпус редуктора 8 установлен на ось через подшипники качения.

На зубцы зубчатого колеса со стороны шестерни действует вертикальная сила Z, приведем ее к центру оси, приложив здесь равные, но противоположно направленные силы Z. Получаем момент, действ на ось КП: 
При норм условиях сцепления в точке контакта колеса с рельсом возникает сила тяги, определяемая усл сцепления Fксц, которая будет приложена к колесу и направлена в сторону движения. Приведя эту силу к оси КП, получаем пару сил с моментом  , которая будет уравновешивать момент
, которая будет уравновешивать момент 
Отсюда следует, что  и
и  . Такая вертикальная сила будет действовать увеличивая (уменьшая) давление КП на путь в зависимости от направления движения локомотива. Сила, действ на зубцы ЗК, может быть определена в зависимости от скорости движения по тяговой хар-ке и выбранного режима движения.
. Такая вертикальная сила будет действовать увеличивая (уменьшая) давление КП на путь в зависимости от направления движения локомотива. Сила, действ на зубцы ЗК, может быть определена в зависимости от скорости движения по тяговой хар-ке и выбранного режима движения.
Приведя силу Z к центру вала шестерни, получим пару сил, уравновешивающую действующий на валу шестерни момент, развив на валу якоря: 
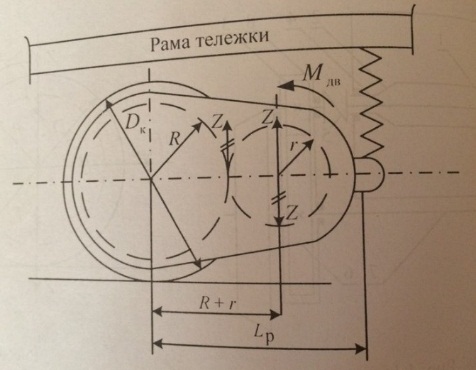
Одновременно на вал шестерни, а от него на редуктор (через подшипники вала шестерни) будет передаваться вертикальная сила Z. Т.к. редуктор опирается на ось и на раму, то сила Z распределяется между осью и КП и подвесным аппаратом
Lp-база редуктора
R+r-централь редуктора
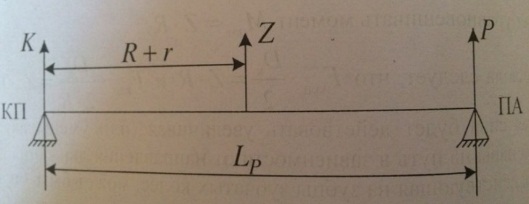
Следовательно, Z=K+P и K*Lp=Z*[Lp-(R+r)]
Из двух этих уравнений видим, что сила:
 - действует на ось колесной пары в направлении вверх, а сила:
- действует на ось колесной пары в направлении вверх, а сила:
 (кН)- действует на раму в направлении вверх, через подвесной аппарат, а на ось КП действует вертикальная сила:
(кН)- действует на раму в направлении вверх, через подвесной аппарат, а на ось КП действует вертикальная сила:
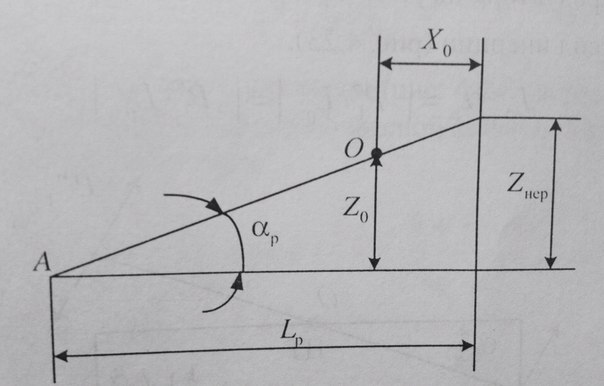
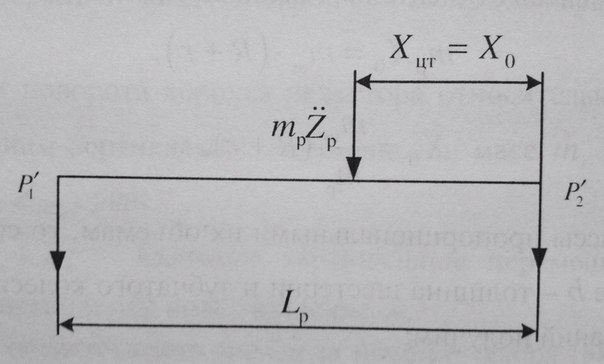
Т.к в приводе II класса присутствует упругая муфта, то нельзя считать, что центр тяжести редуктора совпадает с валом якоря. Расс-м случай, когда редуктор расположен за осью
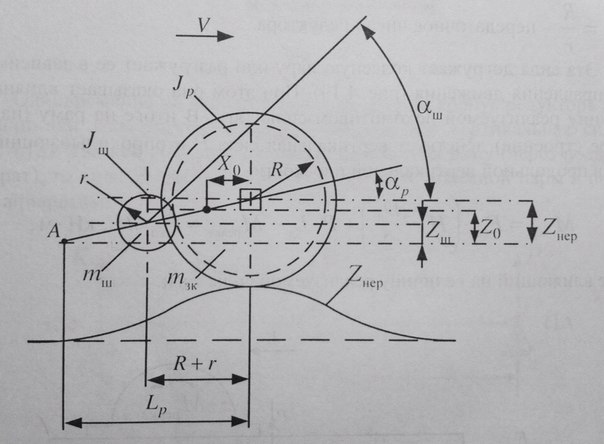
Zнер - величина неровности.
α p, α ш - углы поворота редуктора и вала шестерни, вызванные неровностями.

Из схемы следует, что  ,
,  , - расстояние центра тяжести от оси колесной пары.
, - расстояние центра тяжести от оси колесной пары.
Вертикальная координата сила тяжести:
Из рисунка видно, что вертикальные перемещения колесной пары на величину Zнер можно расс-ть как результат двух движения: верти-го перемещения центра тяжести редуктора и поворота редуктора вокруг центра тяжести на угол α p . Вертикальному перемещению массы редуктора будет противо-ть сила инерции  . Повороту редуктора на угол α p препятствует уже пара сил инерции.
. Повороту редуктора на угол α p препятствует уже пара сил инерции.  , где Р1 – сила, кот догружает КП, Jр – момент инерции редуктора относительно центра тяжести.
, где Р1 – сила, кот догружает КП, Jр – момент инерции редуктора относительно центра тяжести.
Вертикальная сила при этом: 
Результирующая вертикальная динамическая нагрузка на ось составит:
 (см. рис.)
(см. рис.)
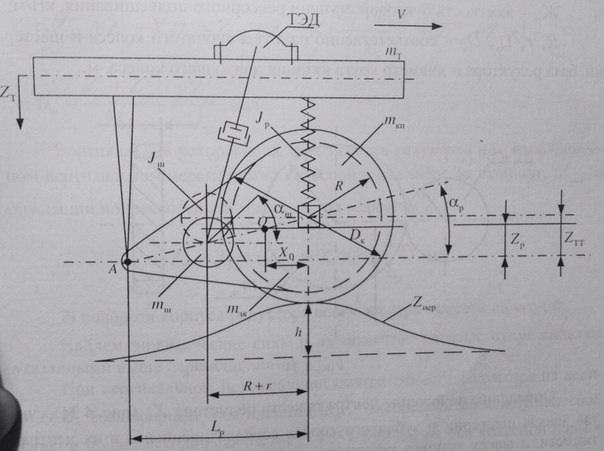
Определим положение центра тяжести редуктора:
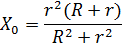
Тогда поворот корпуса редуктора на угол α p можно представить как результат двух движений:
1) Вертикального перемещения центра его тяжести вверх на величину
 гдеZт - перемещение центра тяжести.
гдеZт - перемещение центра тяжести.
2) Поворота корпуса редуктора вокруг центра тяжести на угол α p
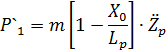
При вертикальном перемещении центра тяжести редуктора на величину Zp, возникающая сила инерции mpZp.. распределится между колесной парой и подвесным аппаратом, причем на ось колесной пары в плоскости зубчатого колеса будет действовать сила:
При повороте корпуса редуктора на угол α p происходит поворот на угол под действием вертикальной силы Zд , возникающий в зацеплении (см. рис.)
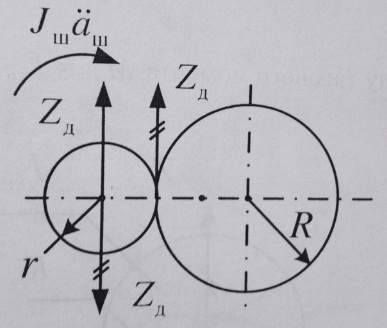
Величина этой силы:

Сила Zд через зубчатое зацепление действует на зубчатое колесо с динамическим моментом:

Таким образом можно сделать след-е выводы:
1) Результирующая максимальная вертикальная сила:

2) На подвесной аппарат действуют результирующая вертикальная сила:

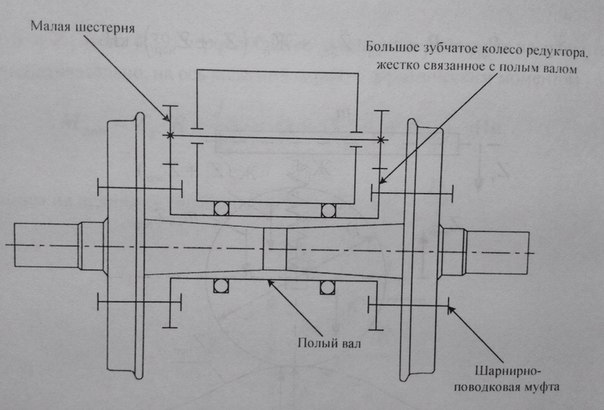
Опорно-рамное подвешивание тягового двигателя и редуктора. Передача момента от вала якоря к КП осуществляется посредством полого вала, охватывающего ось КП и 2ух шарнирно-поводковых муфт. Перемещение рамы тележки относительно оси КП обеспечивается зазором между осью и полым валом.
Расчетная схема тяг.привода 3 класса.
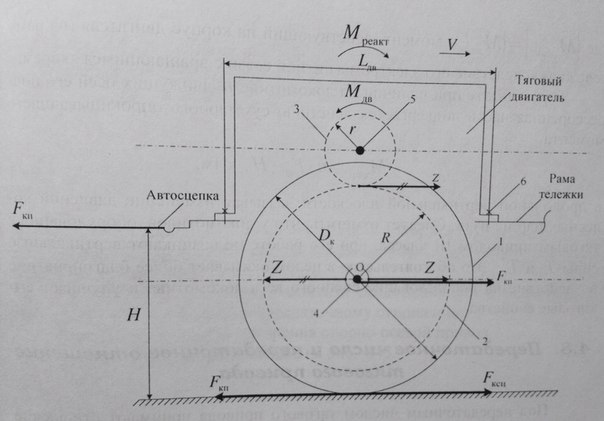
Lдв, Dk,R, r-база двигателя, диаметр круга катания движущего колеса, радиусы зубчатого колеса и шестерни, м
Н- высота оси автосцепки над уровнем головок рельсов, м
О- центр оси КП и зубчатого колеса
1 Движущее колесо 2 Зубчатое колесо, посаженное на вал 3 Шестерня редуктора, посаженная на вал якоря 4 Полый вал, установленный и вращающийся в подшипниках корпуса тяг.двигателя 5 Вал якоря тяг.двигателя 6 Крепление тяг.двиг. к раме тележки
Вращающий момент касательных сил на оси КП.
Mкп=Fкп*Dk/2, где Fкп – касательная сила на ободе движущего колеса
К полому валу приложена сила Z, направленная направо. Нормальное качение колеса по рельсу без проскальзывания: Fкп≤Fксц. Если Fкп>Fксц, возникают условия для боксования. Fкп, приложенная к оси КП, через боксовый узел, раму тележки и автосцепку, передает усилие поезду, обеспечивая его поступательное движение. Надрессорное строение локомотива подвергается действию опрокидывающего момента.

│Мреакт│=│Мдв│- момент, действующий на корпус двигателя из-за его электромагнитной связи с вращ. Якорем. При наличии на локо n движущих осей его подрессоренная часть подвергается- Мопр=n*Fкп*Н, кНм, в продольной вертикальной плоскости, вызывая изм давлений КП на путь.
Передаточное число – отношение диаметра большого зубчатого колеса к диаметру шестерни, на валу якоря ТЭД.

 -число зубьев большого зубчатого колеса и шестерни
-число зубьев большого зубчатого колеса и шестерни
Передаточное отношение-отношение числа оборотов или угловых скоростей вала якоря ТЭД и оси колёсной пары

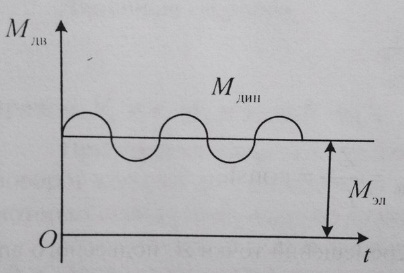
При изменении V, сопровождающейся вертикальными колебаниями подресс массы тележки на валу якоря возникает динамический момент, который созд доп нагрузку на элементы привода и на КП, ухудшая тяговые и динамические хар-ки. Его появление свидетельствует о несовершенстве данного типа привода по передаточному отношению.
Рассмотрим опорно-осевой привод
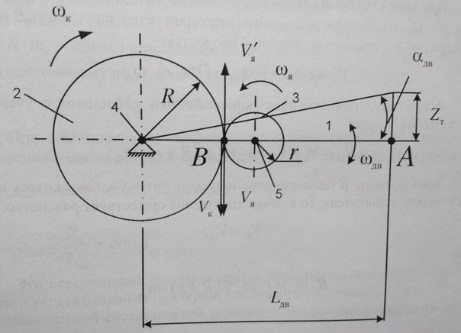
1-корпус ТЭД 2-зубчатое колесо 3-шестерня редуктора 4-ось колёсной пары 5-вал ТЭД А-связь 1 с кронштейном поперечного крепления рамы тележки В-точка зацепления зубчатого колеса и шестерни
Для передаточного отношения тяговой передачи:
wк wдв – угловые скорости поворота оси КП и корпуса двигателя.

|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 2178; Нарушение авторских прав?; Мы поможем в написании вашей работы!