КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лабораторная работа №18. Адаптивный фильтр Калмана
|
|
|
|
Проверка адекватности по Фишеру
12. Вычисляем функцию F.

13. Вычисляем обратную функцию распределения Фишера:

14. Так как Вычисленное F < qF, то с вероятностью 0,95 полученное уравнение адекватно экспериментальным данным.
Основной проблемой, возникающей при любых измерениях, является их недостаточная точность. Имеется два пути решения этой проблемы: повышение точности измерительных приборов и повышение точности путем статистической обработки избыточного числа измерений, в результате которой получают оценку измеряемой величины. Повышение точности измерительных приборов требует существенных затрат, в то время как статистическая обработка измерений при наличии компьютера стоит дешево и проводится достаточно быстро.
Сегодня существует множество методов статистической обработки измерений. Их можно разделить на два больших класса: просто статистической обработки и оптимальной обработки, в результате которой получают в каком- то смысле оптимальную оценку измеряемой величины. Кроме того, обычно разделяют методы статистической обработки для статических и динамических систем. Статистическая обработка статических систем изучалась на 4-м курсе. Это метод наименьших квадратов. Мы ниже рассмотрим несколько методов оптимальной статистической обработки информации динамических систем на конкретных примерах.
Сложность обработки информации в динамической системе заключается в том, что ее состояние меняется во времени и отдельные измерения переводить из одного состояния в другое.
Существует также несколько методов оптимальной статистической обработки для динамических систем. Это фильтры Винера, Винера- Хопфа и др.
В 1961 году американский математик КАЛМАН разработал оптимальный фильтр для линейных нестационарных систем. Преимуществом фильтра Калмана является то, что он решает задачу во временной, а не частотной области, как, например, фильтр Винера.
Калман разработал свой фильтр для многомерных задач Формулировка задачи, как правило, задается в матричной форме, однако мы рассмотрим ниже простейшие скалярные задачи. в матричной форме
Фильтр Калмана существует в непрерывной и в дискретных формах. Разберем дискретный фильтр Калмана.
Рассмотрим следующую задачу
Блок- схема исследуемого процесса имеет вид:
| Ф(t) |
| Н(t) |
| z(t) |
| v(t) |
| w(t) |
| x(t) |
| y(t) |
| f(t) |
Рис.1. Блок – схема объекта.
. Здесь Ф – линейный объект(т.е. объект описываемый линейными соотношениями), на выходе которого вырабатывается неслучайный сигнал y(t). На выходную величину воздействует аддитивный (в виде слагаемого) шум w(t). Шум w(t) – это какие –то случайности внутри нашей системы. После шума мы имеем выходную величину x(t). X(t) – выходной сигнал нашей системы есть сумма неслучайного процесса y(t) и шума. Поэтому это уже случайный процесс. Поэтому в целом наша система – вероятностная (стохастическая). Мы хотим определить неизвестный нам случайный выходной процесс y(t) измерить неслучайную выходную величину y(t), но измеряем мы не ее, и не случайный выходной сигнал системы x(t), а преобразованный линейным блоком Н случайный процесс z(t). Это так называемые косвенные измерения, когда меряется какая – то функция определяемой величины. В общем случае Ф и Н могут изменяться во времени.
Шумы W(t) и v(t) – нормально распределенные случайные процессы с нулевыми математическими ожиданиями, 
M(v) =0 и с постоянными дисперсиями Q и R, соответственно.
Процесс x(t) также распределен нормально, т.к. любое линейное преобразование нормально распределенного процесса есть нормально распределенный случайный процесс, а шум w(t) подчиняется нормальному закону распределения. Измерения производятся с ошибкой v (t).
Таким образом, в действительности мы измеряем величину

, (1)
причем случайный процесс z (t) также распределен нормально.
 Требуется построить фильтр, после которого мы получим наилучшую оценку величины y.
Требуется построить фильтр, после которого мы получим наилучшую оценку величины y.
Каждое последующее состояние системы определяется предыдущим:
Нижеприведенная программа составлена для Q=R=0.1. Для оценки качества фильтрации в программе решается также уравнение незашумленного, якобы «неизвестного» нам процесса.
Программа решения данной задачи в Маткаде приведена на рис.2
Здесь: y-«незашумленная» переменная,
X1- оцениваемая переменная:
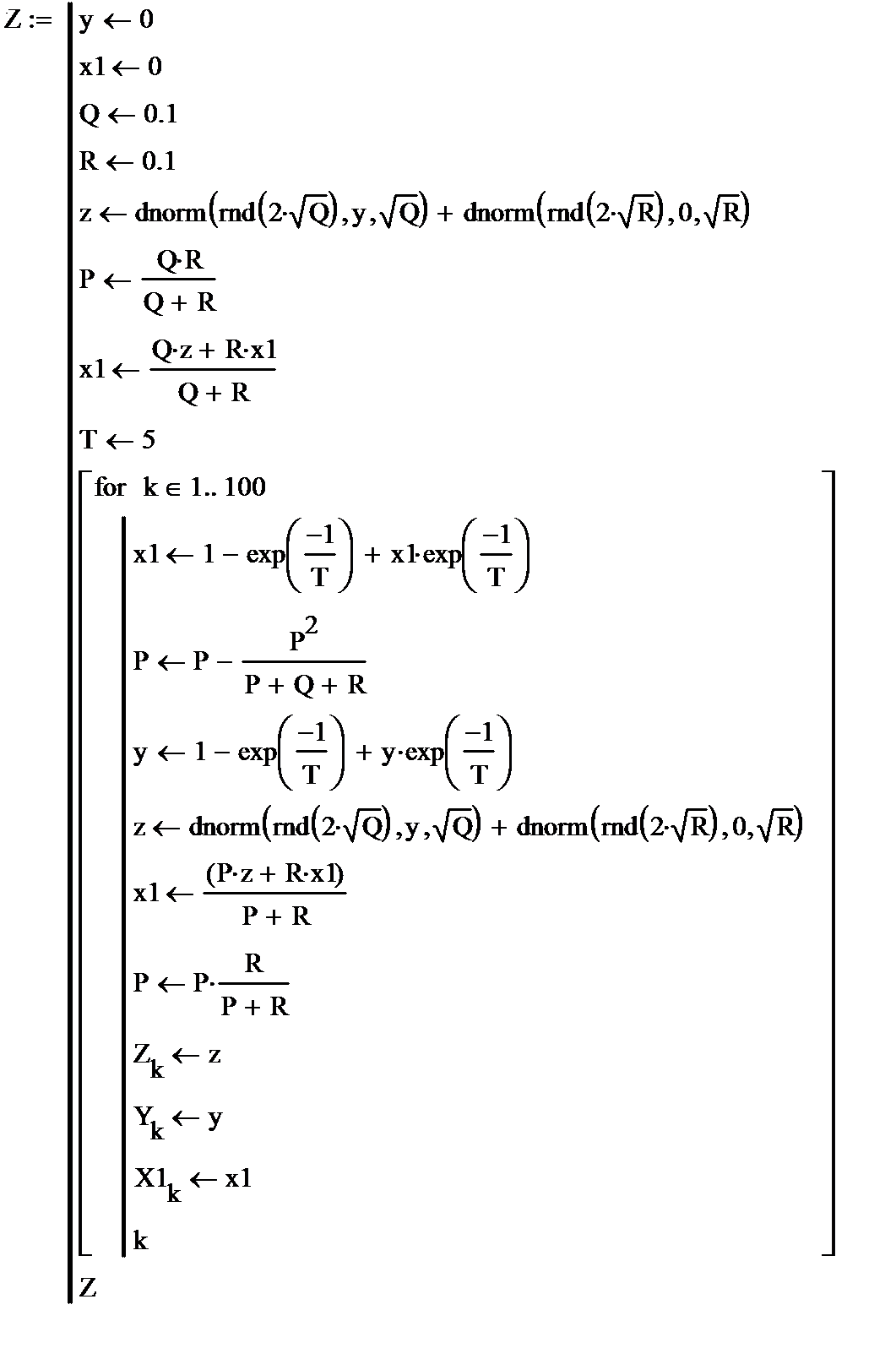 Z- измеряемая переменная.
Z- измеряемая переменная.
В доцикловой части первым оператором присваивается начальное значение «незашумленной» и оцениваемой переменной, причем начальное значение оцениваемой переменной берется «с потолка», вводятся постоянные значения дисперсий обоих шумов и постоянной времени системы, производится первое измерение z и вычисляется первая оценка мат. ожидания и дисперсии.
Измерение рассматривается как сумма двух псевдослучайных величин, каждая из которых образуется с помощью двух функций:
Функция r n d (x) возвращает равномерно распределенное случайное число в диапазоне 0 –x.
Функция d n o r m (x,y,w) возвращает нормально распределенное псевдослучайное число для аргумента x, с математическим ожиданием y и с.к.о z.
В первой функции dnorm за мат. ожидание принято значение y – «незашумленной» переменной, во второй – мат. ожидание равно 0.
В цикловой части программы производится перевод оцениваемых переменной и дисперсии в новое состояние системы, затем переводится в новое состояние «незашумленная» пе
Рис.2. Программа фильтрации фильтром Калмана

ременная, производится новое измерение z и вычисляется новая оценка оцениваемой переменной и дисперсии. В последних операторах цикловой части производится накапливание измерений, оцениваемой и
«незашумленной» переменной в массивы, с целью вывода их на печать после окончания решения
На рис.3. приведены решение задачи. Кривая, изображенная штрихом – «незашумленная» переменная, непрерывная кривая – оценка, точечная кривая – измерения без фильтрации.
Рис.3. Графики кривых
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 1486; Нарушение авторских прав?; Мы поможем в написании вашей работы!