КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лабораторная работа № 19. Подбор ПИД регулятора
|
|
|
|
Система автоматического управления задана своей структурной схемой
(рис.1) и данными, приведенными в таблицах.
Необходимо: Задавшись данными из таблиц 1,2, стабилизировать движение системы око
| X |
| Y |
| + |
| + |
| σ |
| - |
| + |
ло выбранной траектории, подобрав коэффициенты ПИД - регулятора.
Данные для выбора ПИД – регулятора:
Здесь звенья 1 - 4 описывают объект управления, а звено 5 - регулятор.
По исходным данным отдельных звеньев, сведенным в таблицу, следует составить уравнение системы и провести подготовку ее имитационного моделирования на ЭВМ в пакете МАТКАД. Само моделирование будет проведено на лабораторных занятиях.
Цель моделирования - подбор закона управления в звене 5, подбор ПИД- регулятора.
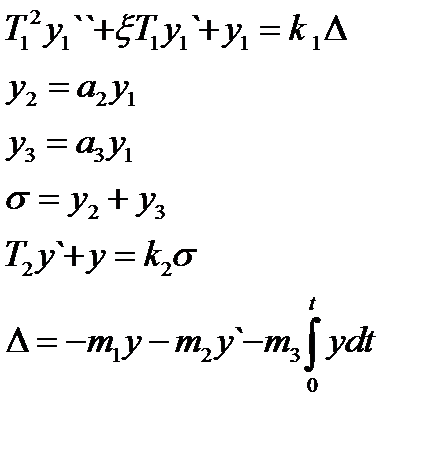
1.Звено 1 - линейное динамическое и описывается дифференциальным уравнением 2-го порядка:
T12 dy1 2/ dt2 +x1T1dy1/dt +y1 = k1D
2.Звено 2 - линейное статическое, зависимость выхода от входа y 2 (y1) задана таблицей. Для ввода в ЭВМ необходимо найти аналитическую функциональную зависимость y2(y1), проведя аппроксимацию. у2=а2у1
3.Звено - также статическое, зависимость выхода от входа y 3 (y 1) также задана таблицей. Однако, из-за неточных измерений аппроксимацию следует проводить линейной регрессией, вычислив коэффициенты уравнения y 3= a3 y 1.
4.Сигналы y 2 и y3 складываются в сигнал s =y2 +y3.
5.Звено 4 - линейное динамическое и описывается передаточной функцией
T2dy/ dt +y = k 2 s.
6.Структура закона управления задана
y5 = m1 y + m 2 dy /dt + m3ò y dt
Составим уравнение всей системы. Для этого:
Выпишем все уравнения
Так как мы будем решать задачу при нулевом входном сигнале, то Δ= -y5, что позволяет объединить уравнения 1 и 6:

Объединим уравнения 2-4. Получим

Запишем уравнения 1 и 5 в операторной форме.
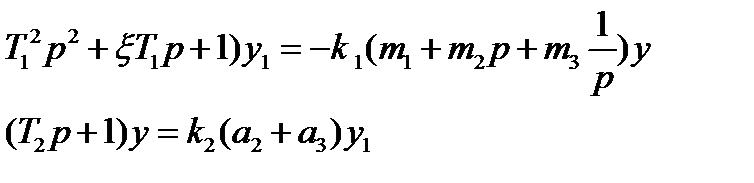
Чтобы освободиться от интеграла продифференцируем первое уравнение

Разрешим второе уравнение относительно у1:
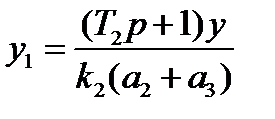
Подставим теперь это выражение в уравнение, которое мы продифференцировали:

Освободимся от знаменателя и сделаем приведение подобных:

Перейдем во временную область

Мы получили однородное дифференциальное уравнение четвертого порядка, которое и будем моделировать
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 868; Нарушение авторских прав?; Мы поможем в написании вашей работы!