КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порядок выполнения работы. Приборы и оборудование
|
|
|
|
Приборы и оборудование
Программа работы
Цель работы
Лабораторная работа №11
Контрольные вопросы
6.1 С какой целью и на каких этапах исключается И -канал в РН и РТ?
6.2 С какой целью и на каких этапах настройки системы электропривода в цепь якоря ДПТ вводится добавочный резистор?
6.3 При каких настройках отключается возбуждение ДПТ?
6.4 Как определить знак обратной связи по току и по напряжению?
6.5 Как определить знак обратной связи по напряжению в контуре регулирования напряжения?
6.6 Как экспериментально на стенде выставить и проверить величину коэффициента усиления П -канала регулятора?
6.7 Какие показатели процессов нужно обеспечить при настройке регулятора тока и регулятора напряжения?
6.8 Как выставить требуемую величину тока упора ДПТ?
6.9 Почему при П -регуляторе существует статическая ошибка?
6.10 Почему в системах чаще используют ПИ -регуляторы?
Федеральное агентство по образованию
ФГОУ СПО «Астраханский колледж вычислительной техники»
Специальность 140613
Исследование разомкнутой системы
“преобразователь частоты – синхронный двигатель”
по дисциплине “Электрический привод”
АКВТ.140613.ЛР42.0011
| Листов | 9 |
| Составил преподаватель | В.В. Ветлугин | ||
| Рассмотрено на заседании цикловой комиссии специальности 140613 Техническая эксплуатация и обслуживание электрического и электромеханического оборудования в нефтяной и газовой промышленности | ||||||||||
| Протокол № | от | “ | ” | г. | ||||||
| и рекомендовано для студентов | ||||||||||
| Председатель цикловой комиссии | С.В. Расторгуева | |
Содержание
| 1 Цель работы | |
| 2 Программа работы | |
| 3 Приборы и оборудование | |
| 4 Порядок выполнения работы | |
| 5 Содержание отчёта | |
| 6 Контрольные вопросы |
1.1 Исследование рабочих свойств системы “Преобразователь частоты – синхронный двигатель” (ПЧ-СД)
2.1 Изучить принципы работы с модулем преобразователя частоты (Приложение А)
2.2 Изучить схему для снятия характеристик системы ПЧ-СД
2.3 Снять семейство механических характеристик
2.4 Снять U -образные характеристики
2.5 Снять регулировочные характеристики
В лабораторной работе используются следующие модули:
- модуль питания стенда (МПС);
- модуль питания (МП);
- силовой модуль (СМ);
- модуль преобразователя частоты (ПЧ).
- модуль тиристорный преобразователь (ТП);
- модуль автотрансформатора;
- модуль ввода/вывода (МВВ);
4.1 Исследуемый асинхронный электродвигатель с фазным ротором входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель Ml, нагрузочную машину – двигатель постоянного тока независимого возбуждения – М2, импульсный датчик скорости МЗ.
Перед проведением работы при выключенном автомате QF1 МПС привести модули в исходное состояние:
- переключатель "Сеть" модуля ТП перевести в нижнее положение, тумблер SA3 – в положение «Руч», SA4, SA6 – в нижнее положение, SA5 – в среднее положение. Перевести ТП в режим регулирования момента (Приложение Б);
- переключатель SA1 модуля ПЧ перевести в среднее положение, SA3 – в среднее в положение «0», потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля;
- переключатель SA1 модуля ЛАТР установить в нижнее положение, рукоятку автотрансформатора установить в крайнее положение против часовой стрелки.
Для проведения работы на персональном компьютере должно быть загружено ПО
Labdrive и соответствующая лабораторная работа. Схема для снятия характеристик системы ПЧ-СД приведена на рисунке 1. Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП).
Якорная обмотка присоединяется к выходам якорного преобразователя модуля ТП через датчики тока и напряжения, Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220В модуля ТП.
Асинхронный электродвигатель подключается к преобразователю частоты ПЧ. Обмотка ротора подключается к регулируемому источнику постоянного тока модуля ЛАТР. Для контроля тока возбуждения в цепь ротора включается амперметр модуля измерительного.
Собственно преобразователь частоты запитывается напряжением 3x380 В от модуля питания через измеритель мощности (МИМ).
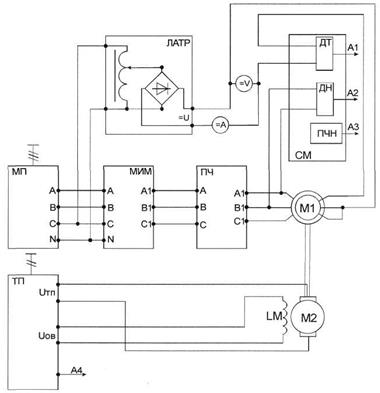
Рисунок 1 – Схема снятия характеристик системы ПЧ-СД
4.2 Частотный пуск
Для плавного пуска синхронного электродвигателя используется частотный пуск. Он заключается в плавном повышении частоты и амплитуды питающего статор двигателя напряжения. Ток возбуждения при этом задается заранее и остается неизменным все время пуска.
Перед проведением опыта необходимо перевести ПЧ в режим регулирования скорости (Приложение А). Автонастройку проводить не рекомендуется. Дополнительно выключить режим компенсации скольжения (5.27 = OFF).
Порядок частотного пуска:
- включить автоматические выключатели QF1, QF2 модулей МПС и МП;
- переключатель SA1 модуля ЛАТР перевести в верхнее положение;
- ручкой автотрансформатора установить ток возбуждения 0,5 А;
- подать разрешение на работу ПЧ и, установив частоту 50 Гц, задать направление вращения;
- сбросить настройки на заводские и запрограммировать преобразователь на режим регулирования скорости (Приложение А);
- в параметре 0.49 установить значение L2 – это откроет доступ ко всем параметрам ПЧ.
4.3 Снятие механических характеристик
Механические характеристики представляют собой зависимость частоты вращения двигателя от момента на валу при постоянном значении тока возбуждения, частоты и напряжения питания n = f(MB), IB, UC, f = const.
Опыт проводится в следующей последовательности:
- включить кнопку "Сеть" модуля ТП;
- увеличить ток возбуждения до 1 А;
- подать разрешение на работу модуля ТП (тумблер SA6);
- зафиксировав необходимые величины согласно таблице 1, задать момент нагрузки. Таким образом снять несколько точек в двигательном и генераторном режимах;
- после проведения опыта вывести момент нагрузки на ноль (RP1 модуля ТП), убрать разрешение на работу ТП, остановить асинхронный электродвигатель.
Напряжение статора можно смотреть на экране ПЧ (параметр 5.02), ток статора смотреть в параметре 4.01.
Таблица 1 – Данные опыта
| UC, В | ||||||
| IС, А | ||||||
| IВ, А | ||||||
| UЯ, В | ||||||
| IЯ, А | ||||||
| UВ, В | ||||||
| n, об/мин | ||||||
| UВХ, В | ||||||
| IВХ, А | ||||||
| РВХ, Вт | ||||||
| SC, ВA | ||||||
 , 1/c , 1/c
| ||||||
| Δ PЭЛ, Вт | ||||||
| Δ PОВ, Вт | ||||||
| PВОЗБ, Вт | ||||||
| Δ PЯ, Вт | ||||||
| PЯ, Вт | ||||||
| PВ, Вт | ||||||
| PС, Вт | ||||||
| ηАД | ||||||
| ηПЧ – АД | ||||||
 АД АД
| ||||||
| ПЧ – АД
| ||||||
| МВ, Н•м |
Повторить опыт при условиях:
- других значениях тока возбуждения и UС, f = const;
- другом значении напряжения статора и IB, f = const;
- другом значении частоты питающего напряжения и f = const.
Напряжение изменять в параметре 0.44 при выключенном приводе.
4.3.1 U -образные характеристики
U -образные характеристики представляют собой зависимости тока статора от тока возбуждения и  от тока возбуждения при постоянном моменте нагрузки IС,
от тока возбуждения при постоянном моменте нагрузки IС,  , MB = const.
, MB = const.
Порядок проведения опыта:
- установить ток возбуждения 0,5 А;
- включить преобразователь частоты и установить выходную частоту 50 Гц;
- подать разрешение на работу ТП (SA6) и, выбрав направление вращения, задать момент нагрузки;
- увеличивать ток возбуждения до 2 А, фиксируя показания в таблице, аналогичной таблице 2.
Повторить опыт для другого значения момента нагрузки.
4.4 Регулировочные характеристики электропривода
Регулировочные характеристики представляют собой зависимости выходной частоты, напряжения, мощности от сигнала задания при постоянном моменте на валу двигателя: f, UС, P, S = f(U3), MB = const.
Для снятия характеристик необходимо:
- установить выходную частоту преобразователя частоты 60 Гц (параметр 0.02 = 60);
- задав нагрузку с помощью тиристорного преобразователя (значение Iя задается преподавателем и выбирается в пределах 0...1 А), уменьшать выходную частоту ПЧ, фиксируя необходимые параметры. Сигнал задания (параметр 7.01) отображается в процентах от максимального сигнала (10 В). Выходная частота отображается в параметре 5.01.
Результаты опыта занести в таблицу 2.
Таблица 2 – Данные опыта
| IЯ = | |||||||||
| UВХ, В | |||||||||
| f, Гц | |||||||||
| UC, В | |||||||||
| IС, А | |||||||||
| IВ, А | |||||||||
| UВ, В | |||||||||
| UЯ, В | |||||||||
| n, об/мин | |||||||||
| UВХ, В | |||||||||
| IВХ, А | |||||||||
| РВХ, Вт | |||||||||
| SC, ВA | |||||||||
| , 1/c
| |||||||||
| Δ PЭЛ, Вт | |||||||||
| Δ PВОЗБ, Вт | |||||||||
| Δ PЯ, Вт | |||||||||
| PЯ, Вт | |||||||||
| PВ, Вт | |||||||||
| PС, Вт | |||||||||
| ηАД | |||||||||
| ηПЧ – АД | |||||||||
| АД
| |||||||||
| ПЧ – АД
| |||||||||
| МВ, Н•м |
Расчетные данные.
Полная выходная мощность преобразователя частоты, ВА:
S = 3•UСФ•IC,
где UСФ – фазное напряжение на выходе ПЧ, В.
Частота вращения электродвигателя, 1/с:
 .
.
Электрические потери в статорной обмотке электродвигателя, Вт:
 ,
,
где rC – активное сопротивление фазы статора, Ом.
Электрические потери в цепи якоря ДПТ, Вт:
 ,
,
где rЯ – активное сопротивление якорной обмотки ДПТ, Ом.
Выходная мощность ТП, Вт:
PЯ = UЯ•IЯ.
Мощность на валу асинхронного электродвигателя, Вт:
РВ = PЯ + Δ PЯЦ + Δ PМЕХ.ДПТ,
где Δ PМЕХ.ДПТ – механические потери ДПТ (Приложение В).
Активная выходная мощность ПЧ, Вт:
РС = РВ + Δ PМЕХ.АД+ Δ PЭЛ,
где Δ PМЕХ.АД – механические потери АДКЗ (Приложение В).
Коэффициент полезного действия электродвигателя:
 .
.
асинхронного двигателя:
 .
.
Коэффициент полезного действия системы:
 .
.
системы:
 .
.
Момент на валу асинхронного двигателя, Н•м:
 .
.
5 Содержание отчёта
5.1 Цель работы
5.2 Программа работы
5.3 Приборы и оборудование
5.4 Ход работы
5.5 Выводы
5.6 Контрольные вопросы
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 979; Нарушение авторских прав?; Мы поможем в написании вашей работы!