КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет замкнутого контура скорости с двухмассовым упругим электромеханическим объектом и подчиненным управлением
|
|
|
|
РАСЧЕТ МОДАЛЬНОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМЫ С ДВУХМАССОВЫМ УПРУГИМ МЕХАНИЧЕСКИМ ОБЪЕКТОМ И НАБЛЮДАТЕЛЕМ
Пример выполнения работы.
Дано:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 
Примем в качестве исходного двухмассовый упругий электромеханический объект с зазором, замкнутый по скорости  с контурным П-регулятором и являющийся внутренним контуром двухконтурной электромеханической системы (см. рисунок 1). Его дифференциальные уравнения имеют вид:
с контурным П-регулятором и являющийся внутренним контуром двухконтурной электромеханической системы (см. рисунок 1). Его дифференциальные уравнения имеют вид:
 (1)
(1)
где  – упругий момент, возникающий при деформации в упругой связи при отсутствии зазора;
– упругий момент, возникающий при деформации в упругой связи при отсутствии зазора;  – упругий момент, описываемый при учете зазора 2d в упругой связи нелинейной (недифференцируемой) функцией вида
– упругий момент, описываемый при учете зазора 2d в упругой связи нелинейной (недифференцируемой) функцией вида
 (2)
(2)
 – соответственно, момент инерции двигателя и момент инерции механизма нагрузки с учетом его приведения к вращению двигателя; p – коэффициент упругости (жесткости упругой связи);
– соответственно, момент инерции двигателя и момент инерции механизма нагрузки с учетом его приведения к вращению двигателя; p – коэффициент упругости (жесткости упругой связи);  – соответственно, угловые скорости первого и второго дисков ;
– соответственно, угловые скорости первого и второго дисков ;  – настраиваемый коэффициент контурного П-регулятора скорости ();
– настраиваемый коэффициент контурного П-регулятора скорости ();  – известное программное (задающее) воздействие (для внутреннего контура скорости это выходной сигнал
– известное программное (задающее) воздействие (для внутреннего контура скорости это выходной сигнал  регулятора РП);
регулятора РП);  и
и  – соответственно, линейное и адаптивное управления, подлежащие определению.
– соответственно, линейное и адаптивное управления, подлежащие определению.
Рисунок 1 - Двухмассовый нелинейный упругий электромеханический объект с подчиненным управлением
Таким образом, описание контура скорости электромеханической следящей системы с двухмассовым упругим механическим объектом исчерпывается (с учетом принятых ранее допущений) системой нелинейных дифференциальных уравнений (1), (2) третьего порядка, записанных в так называемой скоростной форме уравнений упругого объекта. Кроме того, считаем, что в общем случае моменты инерции, отнесенные к двигателю и нагрузке, а также коэффициент жесткости являются неизвестными и нестационарными (функциями времени):
 , (3)
, (3)

Рисунок 2 - Детализированная структурная схема замкнутого по первой скорости двухмассового упругого электромеханического объекта с зазором в упругой связи (1), (2)
Замечание. В дальнейших исследованиях будем пренебрегать нелинейностью и нестационарностью уравнений (1)÷(3) исходного упругого объекта (1)÷(3) и будем рассматривать его линейное и стационарное приближение с некоторыми усредненными постоянными параметрами:
 . (5)
. (5)
С учетом обозначений (5) и пренебрегая в уравнениях (1), (2) зазором ( и
и  ) запишем линейное стационарное приближение контура скорости с упругим механическим объектом в виде:
) запишем линейное стационарное приближение контура скорости с упругим механическим объектом в виде:
 (6)
(6)
Введем следующие обозначения:
 (7)
(7)
С учетом введенных обозначений перепишем линеаризованные уравнения (6) с усредненными параметрами (7) в компактной форме

и для удобства представим их в векторно-матричной записи:
 (8)
(8)
где  – вектор состояния линеаризованного объекта (6);
– вектор состояния линеаризованного объекта (6);  – уравнение измерения;
– уравнение измерения;  (здесь доступной измерению с помощью датчика скорости ДС считается первая скорость ).
(здесь доступной измерению с помощью датчика скорости ДС считается первая скорость ).
Примем дифференциальную линейную систему (8) с параметрами (7) в качестве исходного расчетного объекта управления.
Рисунок 3 - Детализированная структурная схема замкнутого по первой скорости линеаризованного двухмассового упругого электромеханического объекта (6)–(8)
Числовой расчет объекта управления выполним по формулам (7), приняв следующие числовые значения параметров (см. задание):
 кгм2;
кгм2;  кгм2;
кгм2;
 Нм/рад;
Нм/рад;  Ом;
Ом;
 Вс;
Вс;  Вс;
Вс;
 ;
;  Вс/рад;
Вс/рад;
 В/рад;
В/рад;  рад/с;
рад/с;
 = 0,35 (кгм2);
= 0,35 (кгм2);  рад/с;
рад/с;
 ;
;  .
.
Расчет контурных регуляторов  ,
,  выполним по формулам подчиненного управления, справедливым для жесткого объекта (при пренебрежении упругой связью, когда
выполним по формулам подчиненного управления, справедливым для жесткого объекта (при пренебрежении упругой связью, когда  - велико, или
- велико, или  :
:
 ;
;  .
.
Получаем:
• значения контурных регуляторов , :
 ;
;
 ;
;
• значения параметров (7) дифференциальной линейной системы (8):
Запишем дифференциальную линейную систему (8) в численном виде:
Сначала построим объект (6), (7) без учета упругих свойств, упрощая их и получая систему уравнений трехконтурной следящей системы с жестким объектом вида:
Далее построим и проведем исследования двухконтурной следящей системы с жестким объектом, принимая в ней  ,
,  ,
,  :
:
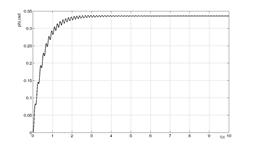
Получим переходный процесс вида (см. рисунок 4). На рисунке 5 представлен график переходного процесса в двухконтурной следящей системе с жестким объектом и подчиненным регулированием.

Рисунок 4 - Переходный процесс в двухконтурной следящей системе с жестким объектом и подчиненным регулированием.
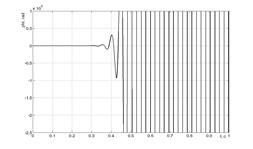
а б
Рисунок 5 - Переходный процесс в системе с двухмассовым упругим объектом с подчиненным регулированием: а) при  ,
,  ; б) при
; б) при  ,
,  .
.
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 642; Нарушение авторских прав?; Мы поможем в написании вашей работы!