КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Адаптивно-линейное управление с параметрической настройкой
|
|
|
|
Построение структуры адаптивно-линейной системы с параметрической настройкой рассмотрим в рамках прямого адаптивного управления с эталонной моделью (24). Искомое управление  является составной функцией вида, показанного в (1), линейная составляющая управления
является составной функцией вида, показанного в (1), линейная составляющая управления  вычисляется по формулам (22), (15), оценки переменных вырабатываются наблюдателем (16), (17), (21).
вычисляется по формулам (22), (15), оценки переменных вырабатываются наблюдателем (16), (17), (21).
Адаптивное управление с параметрической настройкой строится в соответствии с методикой, изложенной в главе 7, и имеет следующий вид:
 , (26)
, (26)
или в скалярной форме (мажорирующую функцию приравниваем к единице):
 ,
,
где  – вектор-строка настраиваемых коэффициентов, а
– вектор-строка настраиваемых коэффициентов, а  – настраиваемый входной коэффициент адаптивного закона (26).
– настраиваемый входной коэффициент адаптивного закона (26).
Алгоритмы настройки параметров адаптивного управления (26) выражаются дифференциальными уравнениями вида
 (27)
(27)
или в скалярной форме:
 (28)
(28)
где  ;
;  ,,
,,  , i = 1, 2, 3,
, i = 1, 2, 3,  – положительные коэффициенты усилений цепей настроек.
– положительные коэффициенты усилений цепей настроек.
Детализированная структурная схема адаптивного закона управления (26) с алгоритмами параметрической настройки (27) для двухмассового упругого объекта представлена на рисунке 11.

Рисунок 11 - Детализированная структурная схема адаптивного закона управления (26) с алгоритмами параметрической настройки (27) для двухмассового упругого объекта
Ниже приведем примеры переходных процессов в двухмассовом упругом электромеханическом объекте с адаптивно-модальной системой управления при следующих значениях коэффициентов настроек параметрической адаптации:  ;
;  ;
;  - нижняя строка матрицы Р, вычисляющийся из уравнения Ляпунова
- нижняя строка матрицы Р, вычисляющийся из уравнения Ляпунова  (
( )
)
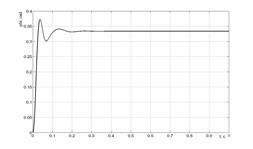
Рисунок 12 - Переходный процесс в системе двухмассового упругого объекта с адаптивно-модальным регулятором.
Проведем исследование двухмассового упругого электромеханического объекта (6)-(8) с адаптивно-модальным управлением (9),(15), (24), (26), (27), (28) изменяя только  и
и  в уравнениях параметрической настройки (27), (28):
в уравнениях параметрической настройки (27), (28):
1)  ,
, 
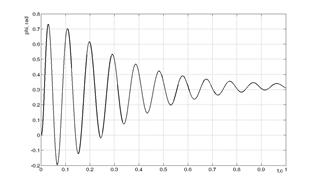
Рисунок 13 - Переходный процесс в системе с двухмассовым упругим объектом с подчиненным регулированием  ,
,  и адаптивно-модальным управлением с параметрической настройкой и эталонной моделью при изменении параметров
и адаптивно-модальным управлением с параметрической настройкой и эталонной моделью при изменении параметров
n)  ,
, 

Рисунок 14 - Переходный процесс в системе с двухмассовым упругим объектом с подчиненным регулированием , и адаптивно-модальным управлением с параметрической настройкой и эталонной моделью при изменении параметров.
Проведем исследование двухмассового упругого электромеханического объекта (6) с адаптивно-модальным управлением (9)-(15), (26) изменяя только  и
и  :
:
1)  ,
, 
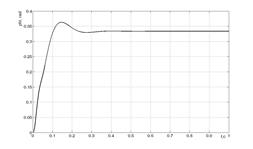
Рисунок 15 - Переходный процесс в системе с двухмассовым упругим объектом с адаптивно-модальным управлением при изменении параметров объекта.
k)  ,
, 
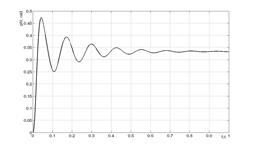
Рисунок 16 - Переходный процесс в системе с двухмассовым упругим объектом с адаптивно-модальным управлением при изменении параметров объекта.
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 470; Нарушение авторских прав?; Мы поможем в написании вашей работы!