КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура модального регулятора с наблюдателем
|
|
|
|
Как отмечалось ранее, линейный (модальный) закон (9) не реализуем, так как переменные  и
и  недоступны измерению с помощью датчиков. Реализуемым является линейный закон обратной связи по вектору оценки состояния
недоступны измерению с помощью датчиков. Реализуемым является линейный закон обратной связи по вектору оценки состояния  линеаризованного объекта (8), вырабатываемому наблюдателем (16), (17), а именно (сравним с законом (9)):
линеаризованного объекта (8), вырабатываемому наблюдателем (16), (17), а именно (сравним с законом (9)):
 . (22)
. (22)
Рисунок 7 - Детализированная структурная схема модального регулятора (22)
Линейный закон (22) с наблюдателем (16), (17) образует реализуемую структуру модального регулятора с наблюдателем в виде «динамической» (так как включает дифференциальные уравнения (17)) линейной обратной связи для не полностью измеримого линейного объекта (6)–(8). Легко показать, что замкнутая линейная система (8), (16), (22) эквивалентна объединенной системе вида
 , (23)
, (23)
где  . Для этого достаточно убедиться в том, что блочные матрицы динамики объединенной системы (8), (16) и (22) и объединенной системы (23) связаны преобразованием подобия, что сразу следует из того, что пары векторов
. Для этого достаточно убедиться в том, что блочные матрицы динамики объединенной системы (8), (16) и (22) и объединенной системы (23) связаны преобразованием подобия, что сразу следует из того, что пары векторов  и
и  связаны невырожденным (неособенным) преобразованием. Но система (23) обладает блочно-треугольной матрицей динамики, и ее характеристический многочлен, а значит, в силу эквивалентности, и характеристический многочлен объединенной системы (8), (16), (22), равен
связаны невырожденным (неособенным) преобразованием. Но система (23) обладает блочно-треугольной матрицей динамики, и ее характеристический многочлен, а значит, в силу эквивалентности, и характеристический многочлен объединенной системы (8), (16), (22), равен

 , (23')
, (23')
т. е. характеристический многочлен объединенной системы, замкнутой линейной обратной связью по оценкам переменных состояния, вырабатываемых наблюдателем, равен произведению характеристических многочленов наблюдателя (18) и системы (10), замкнутой той же линейной обратной связью (9) непосредственно по самим переменным состояния. А это значит, что характеристический многочлен (23') объединенной системы (23) обладает набором корней совпадающих со всеми корнями желаемых характеристических многочленов (12) и (20), т.е. является гурвицевым в силу гурвицевости многочленов (12), (20).
На рисунке 8 приведен график переходного процесса в системе с модальным управлением и наблюдателем для двухмассового упругого электромеханического объекта.
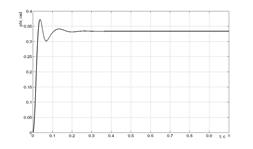
Рисунок 8 - Переходный процесс в системе двухмассового упругого объекта с подчиненным регулированием  , модальным управлением и наблюдателем.
, модальным управлением и наблюдателем.
Важный вывод. Динамическое поведение наблюдателя (16) с обратными связями (21) и динамическое поведение объекта (8) с законом управления (9) по состоянию, или, что то же самое, с законом управления (22) по оценкам состояния, формируются (рассчитываются) независимо друг от друга, и формулы расчета (15) обратных связей для каждого из линейных законов остаются одними и теми же: по состоянию (9) и по оценкам состояния (22).
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 697; Нарушение авторских прав?; Мы поможем в написании вашей работы!