КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управления
|
|
|
|
Определение статических и динамических свойств объекта
По характеру протекания технологических процессов объекты управления делятся на циклические, непрерывно-циклические и непрерывные. Для управления объектами последних двух типов применяются локальные системы управления. По количеству входных и выходных величин объекты делятся на одномерные (один вход – один выход) и многомерные. Последние могут быть многосвязными – когда наблюдается взаимное влияние одной координаты на другую. В зависимости от интенсивности случайных возмущений, действующих на объект, они делятся на детерминированные и случайные (стохастические).
Реальные объекты занимают в пространстве какой-либо объём, поэтому координаты объекта зависят не только от времени, но от пространственных координат. Это обуславливает множество датчиков и множество исполнительных механизмов и, соответственно, распределённое управления. По виду статических характеристик объекты делятся на линейные и нелинейные. Последние могут допускать линеаризацию в рабочей точке или быть существенно нелинейными. Поэтому основной целью построения математической модели объекта управления является определение структуры объекта, его статических и динамических характеристик.
Статические и динамические свойства объекта управления описываются системой нелинейных алгебраических и дифференциальных уравнений, которая называется математической моделью объекта управления. Если отклонения переменных относительно рабочей точки малы, то можно с помощью методов линеаризации перейти к системе линейных уравнений. Преобразование Лапласа связывает систему линейных дифференциальных уравнений с передаточной функцией, частотными характеристиками и переходной функцией. Последние две характеристики можно снять экспериментально. Таким образом, существуют два метода определения свойств объекта – аналитический и экспериментальный. Наиболее эффективен комбинированный метод, когда используют математическую модель, а её коэффициенты определяют экспериментально.
При экспериментальной оценке предварительно устанавливается равновесный режим работы объекта, после чего на его вход подается детерминированное воздействие (единичное входное ступенчатое воздействие, линейно возрастающая функция или синусоида). Если это невозможно, используют данные нормальной эксплуатации технологического комплекса и статистические методы обработки информации.
Анализ структур схем объектов управления показывает, что они имеют вид цепочек последовательно соединённых звеньев. Наиболее распространенными видами звеньев являются инерционные, интегрирующие, пропорциональные и звено запаздывания.
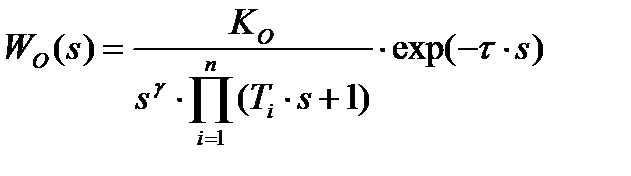
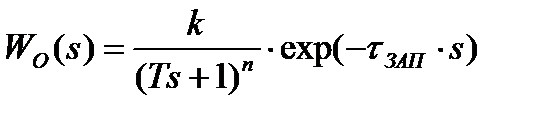
Структуру передаточной функции линейной модели объекта управления обычно выбирают в виде дробно-рациональной функции
Такие объекты называются объектами с самовыравниванием, т.к. переходная характеристика (рис. 2) течением времени стремится к установившемуся значению.
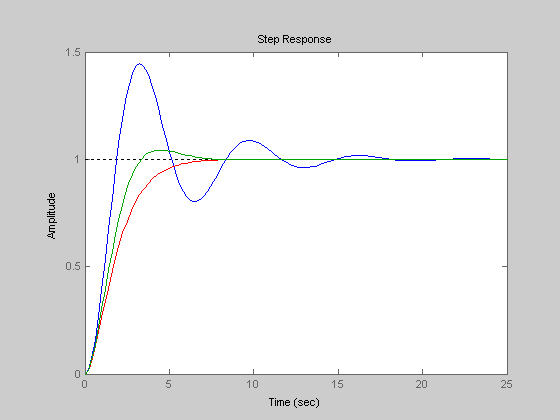
Рис. 2
Если переходная характеристика стремится в бесконечность (рис. 3), то отсутствует самовыравнивание (объекты без самовыравнивания) и в передаточной функции появляются интегрирующие звенья 1/sγ
 .
.
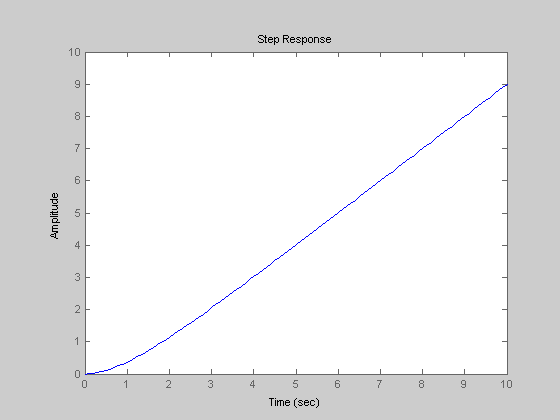
Рис. 3
Обычно астатизм (порядок) системы в целом γ ≤ 3, а число последовательно включённых апериодических звеньев n = 1, 2, 3.
Свойство объекта самостоятельно переходить в устойчивое состояние при изменении входного воздействия называется самовыравниванием. Количественно эта характеристика определяется отношением изменения входной координаты к изменению выходной координаты по достижении объектом нового равновесного значения и называется степенью самовыравнивания. Чем больше эта величина, тем меньше отклонение выходной координаты от первоначального значения. Величина, обратная степени самовыравнивания, называется динамическим коэффициентом передачи объекта управления.
Объекты обладают также запаздыванием, т.е. изменение выходной координаты начинается не одновременно с приложением воздействия, а спустя некоторое время τ. Наличие запаздывания объясняется конечной скоростью распространения потоков информации в объектах. Запаздывание присуще транспортным системам (конвееры), электромеханическим объектам (двигатель начинает вращаться, если электромагнитный момент больше момента сопротивления), ухудшает их устойчивость и влияет на выбор структуры и параметров регулятора.
Запаздывание в объекте управления учитывается звеном запаздывания
 .
.
На рис. 4 представлен переходный процесс апериодического звена первого порядка с запаздывание τ=1с.
Объекты управления способны накапливать энергию или вещество, т.е. они обладают ёмкостью и это свойство характеризуется коэффициентом ёмкости. Это количество энергии или вещества, которое надо подвести к объекту (или отвести), чтобы изменить величину регулируемой координаты на единицу измерения. Различают одноёмкостные (резервуары и аппараты с регулируемым уровнем жидкости) и многоёмкостные (печи спекания, теплообменники) объекты.
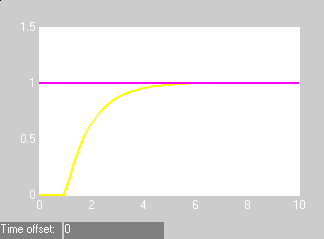
Рис. 4
Все физические объекты имеют массу и, следовательно, обладают инерционностью. Это свойство для электрических машин характеризуется электромеханической постоянной времени ТМ. Так как любая машина содержит индуктивности, то электромагнитные процессы будут характеризоваться электромагнитной постоянной ТЭ.
Структуру объекта управления, коэффициент передачи, постоянные времени и запаздывание можно рассчитать по экспериментально снятой кривой разгона объекта управления. Эта кривая представлена на рис. 5 при условии, что входное воздействие есть 1(t). Порядок решения может быть следующим:
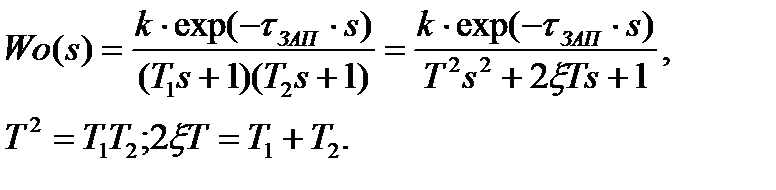
- по виду кривой разгона (она имеет характерную S-образную форму) предполагаем, что объект относится к статическим звеньям второго порядка и содержит, возможно, звено запаздывания, следовательно
- определяем новое установившееся значение выходной величины у∞, что позволяет найти статический коэффициент усиления k;
- проводим касательную в точке перегиба i;
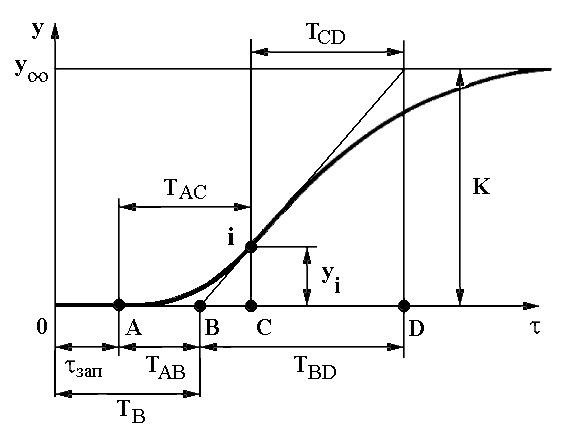
Рис. 5
- определяем соотношение TCD/TBD; если оно больше 0,74, то относим объект к статическим звеньям второго порядка (в противном случае считаем, что порядок объекта выше второго);
- по соотношению TCD/TBD и по графику (рис. 6) находим коэффициент демпфирования ζ;
- определяем постоянную времени T, исходя из соотношения TCD =2ξT;
- для полученного значения коэффициента демпфирования ζ по графику (рис. 6) находим соотношение ТАВ /TBD, используя его, рассчитываем TAB и определяем время транспортного запаздывания τЗАП = ТВ – ТАВ; если время запаздывания оказывается очень малым или отрицательным, можно попробовать скорректировать положение касательной для того, чтобы точно получить τЗАП = 0.
Если соотношение TCD/TBD меньше 0,74, то считаем, что порядок объекта выше второго и принимаем передаточную функцию
 .
.
Параметры передаточной функции определяем в следующей последовательности:
- определяем новое установившееся значение выходной величины у∞, что позволяет найти статический коэффициент усиления k;
- проводим касательную в точке перегиба i;
- по графику определяем yi/y∞, округляем его до ближайшего меньшего табличного значения (табл. 1) и находим порядок объекта n;
- по графику определяем TBD и, используя табличное значение TBD / T для найденного порядка n, вычисляем постоянную времени Т;
- по найденному из графика значению ТBD и табличному значению ТAB / ТBD вычисляем ТAB;
- рассчитываем время запаздывания τЗАП = TB – TAB.
Рис. 6
Таблица 1
| n | yi /y∞ | TAB / TBD | TBD / T | TAB / T | TAC / T |
| 0,264 | 0,104 | 2,718 | 0,282 | ||
| 0,323 | 0,218 | 3,695 | 0,805 | ||
| 0,353 | 0,319 | 4,463 | 1,425 | ||
| 0,371 | 0,410 | 5,119 | 2,100 |
Обработку экспериментальной кривой разгона можно выполнить также с помощью пакета прикладных программ IPC-CAD [1].
Систему дифференциальных уравнений получают на основании закона сохранения энергии – уравнений материального и энергетического баланса. Математические модели двигателей постоянного и переменного тока приведены в [2-4] и применяются в современных системах управления [5-8]. На рис. 7 и 8 приведены структурные схемы двигателя постоянного тока с независимым возбуждением для случая переменного и постоянного магнитного потока возбуждения, соответственно.
Механическая часть двигателя характеризуется интегрирующим звеном с постоянной времени ТМ, величина которой определяется суммой момента инерции якоря двигателя и момента инерции всех движущихся частей рабочей машины, приведёнными к валу двигателя.
Механическая часть двигателя характеризуется интегрирующим звеном с постоянной времени ТМ, величина которой определяется суммой момента инерции якоря двигателя и момента инерции всех движущихся частей рабочей машины, приведёнными к валу двигателя. Электромеханическое преобразование энергии отражается пропорциональным звеном с коэффициентом передачи кФ = с, которое указывает, что электромагнитный момент двигателя пропорционален току якоря. Электрическая цепь якоря двигателя представлена инерционным звеном с постоянной времени ТЯ = ТЭ. Это звено характеризует, как изменяется ток якоря при изменении разности (UЯ – е). Противоэдс якоря е = кФw отражается в виде отрицательной обратной связи. Такая связь является внутренней, т. к. она соответствует природе физических процессов в описываемом объекте, а не создана системой регулирования.
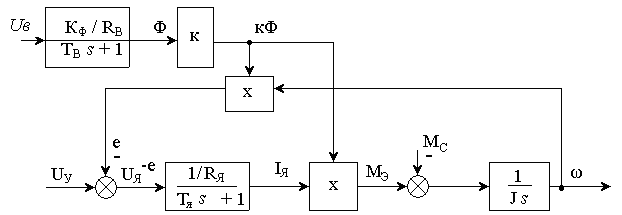
Рис. 7
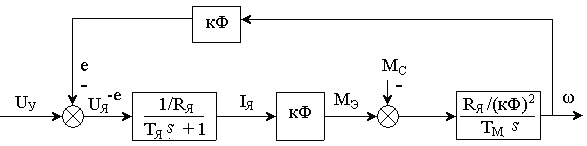
Рис. 8
Системы автоматического управления электроприводами машин и установок имеют ряд особенностей: чёткое разделение системы на две части – объект регулирования (неизменяемая часть) и регулятор (корректирующее устройство, изменяемая часть), а также использование серийной (стандартной) аппаратуры. Необходимое ограничение нескольких координат движения достигается с помощью многоконтурной системы регулирования, а число регуляторов равно числу регулируемых координат. Согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 1340; Нарушение авторских прав?; Мы поможем в написании вашей работы!