КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Квадратичных оценок качества
|
|
|
|
Синтез регуляторов с помощью интегральных
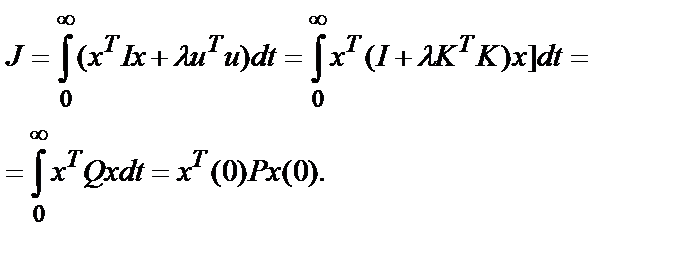
Рассмотрим метод синтеза оптимальных систем управления с использованием обратной связи по состоянию и интегральных квадратичных оценок качества [26-29], представленных в функции вектора состояния
 .
. 
Для получения минимального значения J будем считать, что существует производная

если положить, что
Тогда

При подстановке верхнего предела интегрирования мы предполагали, что система устойчива и, следовательно, х (¥) = 0.
Таким образом, чтобы минимизировать оценку качества J, необходимо определить матрицу Р, удовлетворяющую уравнениям

и найти минимум интегральной квадратичной оценки качества
путем настройки одного или нескольких параметров системы.
Рассмотрим в качестве примера систему, у которой
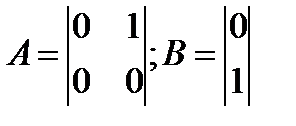
Управляющий сигнал выберем в виде линейной комбинации двух переменных состояния:
u = - к1х – к2х,
тогда
Решение матричного уравнения
HT P + P H = - I
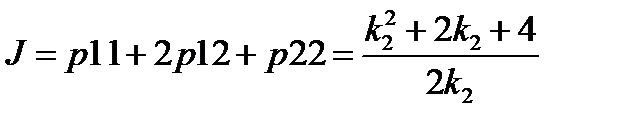
при условии, что матрица Р – симметричная, и k1 = 1, приводит к следующему результату:

Если  , то
, то
 .
.
Приравняем производную dJ/dk2 нулю, отсюда k2 = 2 и минимальное значение J = 3.
Матрица Н для скорректированной замкнутой системы примет вид:
 ,
,
характеристическое уравнение будет равно
det p I – H = p2 + p2 + 1 = 0
и переходный процесс апериодический.
Чтобы учесть затраты энергии на выработку управляющего сигнала, можно использовать оценку качества
Матрица Р, как и раньше, подчиняется уравнению
Скалярный весовой коэффициент l следует выбирать так, чтобы вклад переменных состояния в оценку качества был сопоставим с вкладом в неё второго слагаемого подинтегрального выражения, учитывающего ограниченные энергетические возможности системы.
В более сложных случаях матрица Р размерности n ´ n находится из решения уравнения Рикатти
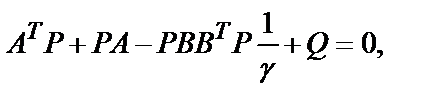
где γ – скалярный весовой коэффициент. Во многих случаях Q = I.
Другой подход к задаче стабилизации основан на том, что если система устойчива, то у неё есть квадратичная функция Ляпунова вида
 (1)
(1)
Рассмотрим систему
с обратной связью по состоянию  и уравнением замкнутой системы
и уравнением замкнутой системы
 .
.
Тогда, если найдутся К и Р > 0 такие, что
 ,
,
то для системы существует функция Ляпунова вида (1). Две матричные переменные, Р и Q, входят в это неравенство нелинейным образом. Введением двух новых переменных – Y=KQ, Q=P -1 – это неравенство становится линейным по переменным Р и Q.
Матрица коэффициентов обратных связей регулятора определяется на основании следующей теоремы: если Q – решение матричного неравенства Ляпунова  то регулятор
то регулятор  с матрицей
с матрицей  стабилизирует систему
стабилизирует систему  , а квадратичная форма
, а квадратичная форма  является функцией Ляпунова для замкнутой системы.
является функцией Ляпунова для замкнутой системы.
Поиск квадратичной функции Ляпунова называется квадратичной стабилизацией. Он не дает решения в явном виде, а сводит задачу к решению линейных матричных неравенств. Однако такой подход особенно эффективен для задач робастной стабилизации объектов управления при наличии неопределённостей.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 533; Нарушение авторских прав?; Мы поможем в написании вашей работы!