КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Курсовая работа. “Анализ и синтез системы управления”
|
|
|
|
“Анализ и синтез системы управления”
1. Объект управления представлен на рис. 1, его параметры – в таблице 1.
WOC(s)
e(s) ω(s)
UЗ(s) U(s) ∆(s) ω(s)
W1(s) W2(s) W3(s)
ω0
M(s)
Рис. 1
Таблица 2
| №п/п | k1 | k2 | k3 | kOC | T1, с | T2, с | T3, с |
| 5,56 | 0,237 | 1,0 | 0,01 | 0,021 | 0,041 | ||
| 4,39 | 0,134 | 1,2 | 0,01 | 0,031 | 0,056 | ||
| 4,58 | 0,342 | 1,3 | 0,01 | 0,018 | 0,061 | ||
| 6,01 | 0,245 | 1,4 | 0,01 | 0,016 | 0,038 | ||
| 4,12 | 0,148 | 1,0 | 0,01 | 0,033 | 0,062 | ||
| 5,87 | 0,186 | 1,15 | 0,01 | 0,032 | 0,071 | ||
| 4,98 | 0,267 | 1,25 | 0,01 | 0,022 | 0,094 | ||
| 5,72 | 0,213 | 1,35 | 0,01 | 0,017 | 0,049 | ||
| 5,31 | 0,187 | 1,45 | 0,01 | 0,025 | 0,053 | ||
| 4,48 | 0,225 | 1,0 | 0,01 | 0,04 | 0,029 | ||
| 4,18 | 0,156 | 1,1 | 0,01 | 0,039 | 0,028 | ||
| 4,76 | 0,149 | 1,5 | 0,01 | 0,023 | 0,045 | ||
| 5,25 | 0,302 | 1,17 | 0,01 | 0,035 | 0,032 | ||
| 4,78 | 0,278 | 1,28 | 0,01 | 0,024 | 0,056 | ||
| 5,61 | 0,176 | 1,34 | 0,01 | 0,034 | 0,079 | ||
| 4,89 | 0,141 | 1,41 | 0,01 | 0,026 | 0,048 | ||
| 5,28 | 0,168 | 1,36 | 0,01 | 0,036 | 0,035 | ||
| 4,66 | 0,202 | 1,17 | 0,01 | 0,028 | 0,066 | ||
| 6,12 | 0,144 | 1,39 | 0,01 | 0,037 | 0,061 | ||
| 5,55 | 0,197 | 1,44 | 0,01 | 0,029 | 0,072 |
Выполнить следующее:
- c помощью пакета MATLAB+Simulink исследовать статические и динамические свойства объекта управления: построить переходную и импульсную переходную функции, определить прямые и косвенные показатели качества;
- построить все частотные характеристики, определить запас устойчивости по амплитуде и фазе;
- результаты свести в таблицу и дать характеристику объекта управления.
2. Для последовательной коррекции на вход разомкнутого контура в схеме рис. 2 ввести регулятор с передаточной функцией WCT(s), как показано на рис. 3.
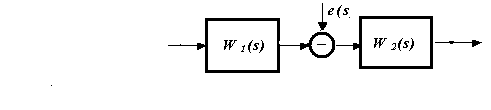
Рис. 2
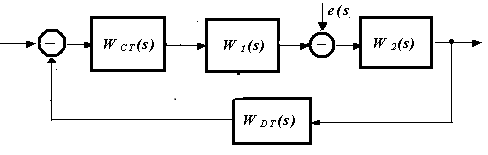
Рис. 3
Для схемы рис. 3 выполнить следующее:
- выбрать структуру и параметры регулятора по критерию модульного оптимума;
- по кривым переходных процессов определить прямые показатели качества, а по частотным – косвенные;
- исследовать динамику системы при действии возмущения e(s);
- результаты экспериментов свести в таблицу и сделать выводы.
Для всех вариантов WDT(s) = kDT = 0,09.
В дальнейшем считать замкнутую систему управления апериодическим звеном первого и второго порядка с передаточной функцией WKT(s).
3. Для последовательной коррекции на вход разомкнутого контура в схеме рис. 4 ввести регулятор с передаточной функцией WC(s), как показано на рис. 5.
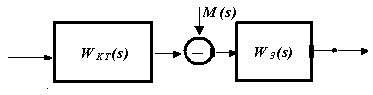
Рис. 4
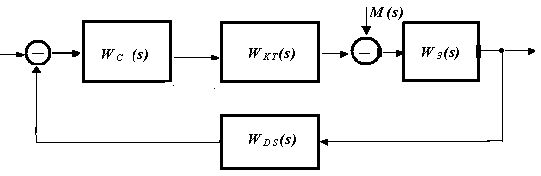
Рис. 5
Для схемы рис. 5 выполнить следующее:
- выбрать структуру и параметры регулятора WC(s) по критерию модульного оптимума;
- по кривым переходных процессов определить прямые показатели качества, а по частотным – косвенные;
- исследовать динамику системы при действии возмущения М(s);
- результаты экспериментов свести в таблицу и сделать выводы.
Для всех вариантов WDS(s) = kDS = 0,03.
4. Рассмотреть двухконтурную систему управления (рис. 6) без учёта и
с учётом обратной связи WOC(s). Результаты исследований свести в
общую таблицу и сделать выводы. Если действие внутренней обрат-
ной связи даёт неудовлетворительные показатели качества, выбрать
структуру и параметры ПИД-регулятора для одноконтурной системы.
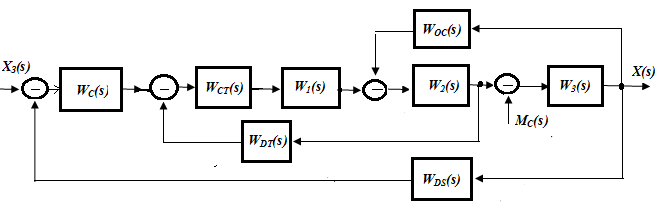
Рис. 6
5. Принять Т3 = 10*Т3. Выбрать структуру и параметры регулятора WC(s) (рис. 5) по критерию симметричного оптимума, определить прямые и косвенные показатели качества; исследовать динамику системы при действии возмущения M(s), результаты исследований свести в таблицу.
6. Повторить пункт 4 при условии, что структура и параметры регулятора WC(s) выбраны по критерию симметричного оптимума, а регулятор WCT(s) – по критерию модульного оптимума. Исследовать систему с фильтром.
7. Рассчитать матрицы А и В:
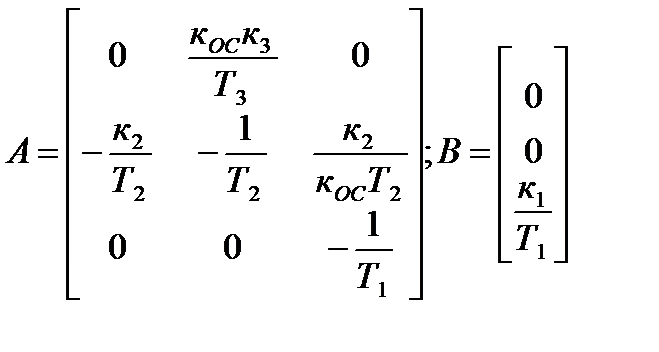
Быстродействие системы управления принять равной быстродействию системы с фильтром п. 6. Рассчитать вектор коэффициентов жестких отрицательных обратных связей и исследовать динамику системы, представленной на рис. 7.
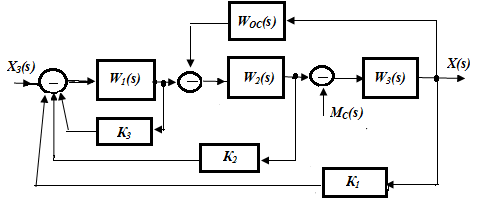
Рис. 7
8. Показатели качества всех рассмотренных систем свести в таблицу и сделать вывод о целесообразности применения конкретной структуры и параметров регулятора. Отчёт оформить на листах формата А4 в соответствии с существующими стандартами СФУ.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 406; Нарушение авторских прав?; Мы поможем в написании вашей работы!