КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типовые алгоритмы управления и типовые регуляторы
|
|
|
|
В качестве корректирующих устройств чаще всего применяются аналоговые и дискретные регуляторы следующих типов:
- пропорциональные (П) – реализуются при помощи усилителей (рис. 12)

Рис. 12
с передаточной функцией
Wp(s) = kР =kП;
управляющее воздействие таких регуляторов и в статике и в динамике пропорционально сигналу ошибки, они обладают высоким быстродействием и ограниченной точностью при управлении инерционными объектами; статическая ошибка обратно пропорциональна коэффициенту передачи; на рис. 13 представлена переходная характеристика регулятора (kП = 2), на рис. 14 - логарифмические амплитудная и фазовая характеристики (диаграмма Боде);
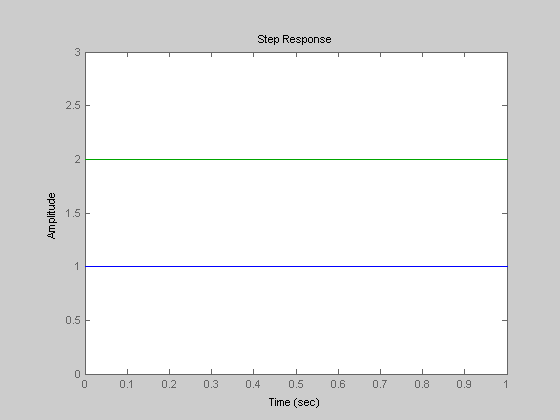
Рис. 13
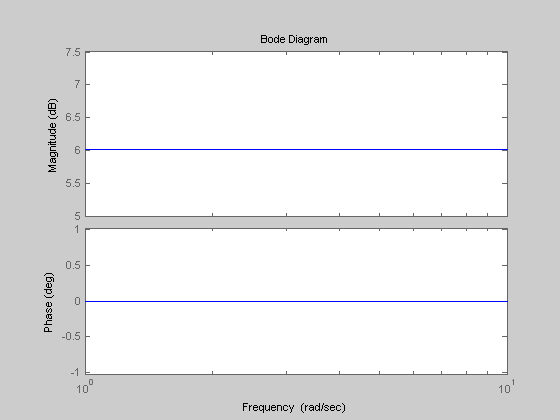
Рис. 14
- интегральные (И) – реализуются с помощью звена (рис. 15)
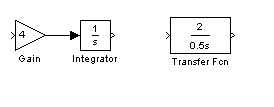
Рис. 15
с передаточной функцией
Wp(s) = kI / s = kP /ТI s;
управляющее воздействие в каждый момент времени пропорционально интегралу от сигнала ошибки, обладает высокой точностью в установившемся режиме (при t → 0 kI → ∞), меньшим быстродействием и большей колебательностью; скорость перемещения вала исполнительного механизма (ИМ) пропорциональна величине отклонения регулируемого параметра от заданного; динамический параметр настройки регулятора kP численно равен величине скорости перемещения вала ИМ, приходящейся на единицу отклонения регулируемого параметра от заданного; постоянная ТI количественно характеризует скорость изменения выходной величины, приходящейся на единицу изменения входной величины, чем больше ТI, тем меньше изменение выходной величины в единицу времени; эту постоянную называют время удвоения или время изодрома; на рис. 16 и 17 показаны динамические характеристики такого регулятора при kP = 2 и TI = 0,5 c.
|
|
|
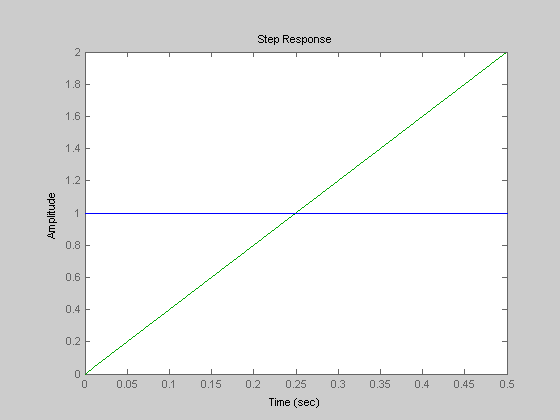
Рис. 16
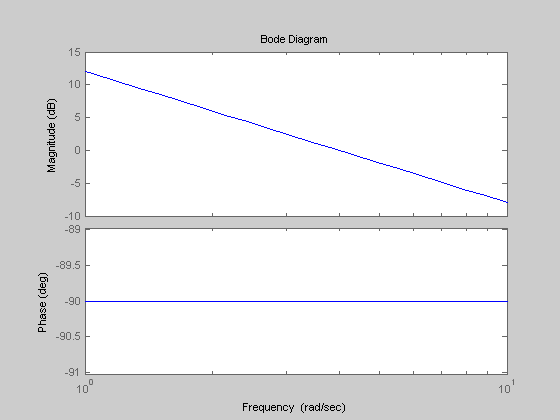
Рис. 17
- пропорционально – интегральный (ПИ) – реализуется звеном (рис. 18)
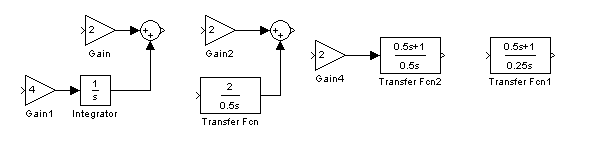
Рис. 18
с передаточной функцией
Wp(s) = kп + kI /s = kР + kР /TI s = kP (TI s + 1 )/ТI s;
обладает достоинствами и недостатками первых двух; время изодрома ТI – это время, за которое угол поворота вала ИМ под действием пропорциональной части удваивается интегральной частью, поэтому Тi называют временем удвоения; динамические характеристики регулятора представлены на рис. 19 и 20;
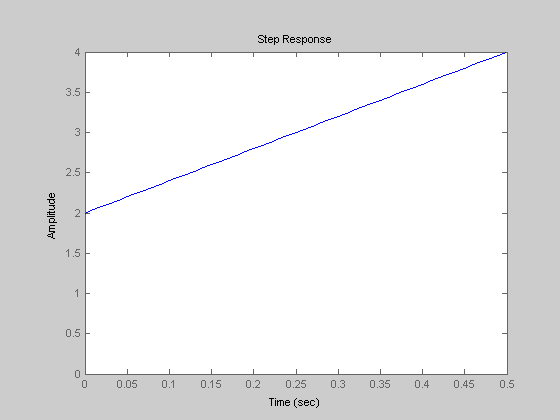
Рис. 19
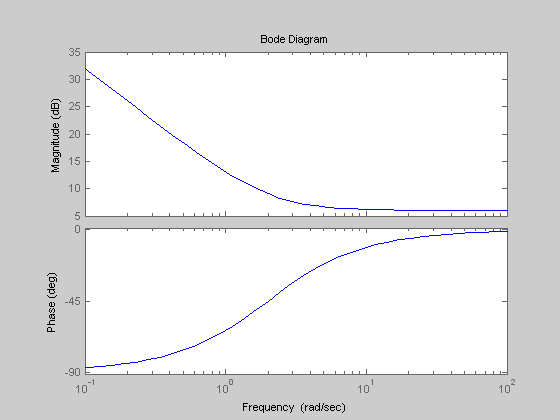
Рис. 20
- пропорционально–дифференциальный (ПД) – реализуется звеном (рис. 21) с передаточной функцией
Wp(p) = kП + kd s = kP + kP Тd s;
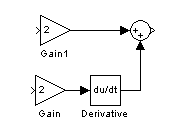
Рис. 21
регулятор реагирует не только на величину сигнала ошибки, но и на скорость его изменения, благодаря этому достигается эффект упреждения; за время предварения Тd угол поворота вала ИМ под действием дифференцирующей части удваивается (это время, за которое входная величина, изменяясь с постоянной скоростью, достигает значения выходной величины). На рис. 22 представлена ЛФЧХ такого регулятора при kP = 2 и Td =0,5 c. Переходной процесс при единичном входном ступенчатом воздействии содержит дельта-функцию.
Рис. 22
Промышленные регуляторы реализуют операцию дифференцирования с помощью реального дифференцирующего звена (рис. 23), передаточная функция которого
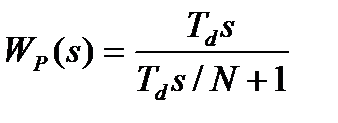 , N – const, N = 3 - 10.
, N – const, N = 3 - 10.
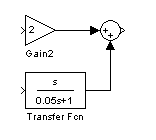
Рис. 23
На рис. 24 и 25 представлены динамические характеристики такого регулятора при kP = 2, Td = 0.5 и N = 10.
Рис. 24
Рис. 25
- пропорционально-интегрально-дифференциальный (ПИД) – реализуется звеном (рис. 20) с передаточной функцией
Wp(s) = kП + kI /s + kd s = kP(1 + ТI s + TITd s 2 )/ТI s =
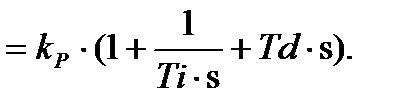
и обеспечивает наилучшие показатели качества переходных процессов; регу-
лятор может быть представлен как последовательное или параллельное соединение звеньев (рис. 26).
Рис. 26
Промышленный регулятор (рис. 27) имеет передаточную функцию

где N – обычно фиксируется проектировщиком в диапазоне 3 – 10. Его динамические характеристики представлены на рис. 28 и 29.
|
|
|
Рис. 27
Рис. 28
Рис. 29
Классические ПИ – и ПИД – регуляторы имеют различные структуры (рис. 30), которые могут быть использованы как в непрерывном, так и в дискретном случае. Структуры идеального и реального регуляторов представлены на рис. 30а, б и г.
Структуру ПИ – регулятора можно рассматривать как последовательное соединение форсирующего и интегрирующего звеньев. Такой регулятор обладает свойством упреждения: выходной сигнал сдвинут так, как будто интегрирование началось раньше входного сигнала на время изодрома. Последовательное соединение П – и И – регуляторов составляет структуру И – регулятора, но изменяет время интегрирования в kР раз. Параллельное соединение этих же регуляторов дает структуру ПИ – регулятора. Последовательное соединение ПД – и И – регуляторов порождает ПИ – регулятор, параллельное соединение этих же регуляторов порождает ПИД – регулятор. Последовательное и параллельное соединение ПИ – ПД – регуляторов порождает структуру ПИД – регуляторов, но с разными параметрами.
Регулятор структуры рис. 30г не даёт большого управляющего сигнала при скачкообразном изменении задающего воздействия.
Структура 30д даёт наилучший результат как при изменении задания, так и при изменении нагрузки (разница в параметрах регулятора минимальна, если он настроен по входному сигналу или по возмущениям процесса).
Регулятор с фильтром, передаточная функция которого
 ,
,
позволяет фильтровать все три части регулятора или только пропорциональную и дифференциальную части. В этом случае можно уменьшить высокочастотный шум измерений.
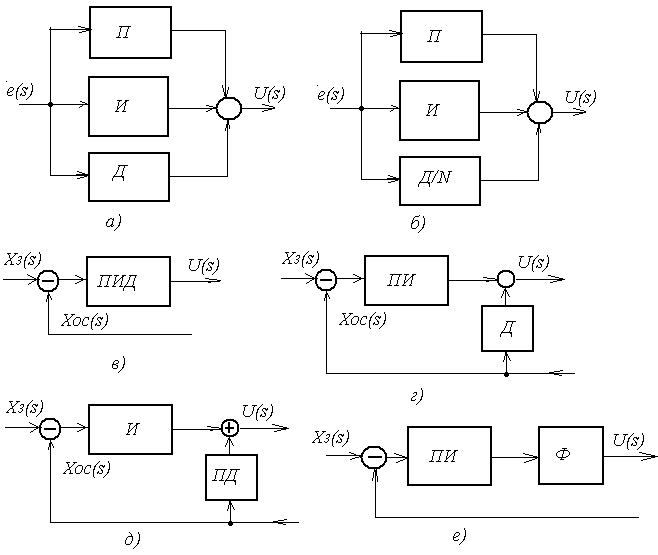
Рис. 30
Если фильтр нижних частот соединить последовательно с ПИ – регулятором (рис. 30е) или два ПИ – регулятора соединить каскадно, то получится структура, известная под названием ПИ2 – регулятор (PIPI controller). Такие регуляторы иногда используются в системах электропривода. Фильтр нижних частот ослабляет уровень высокочастотных сигналов и хорошо гасит резонансные колебания в системах механического привода. Передаточная функция регулятора

Значение ТФ1 обычно принимается равным резонансному периоду. ЛАЧХ регулятора представлена на рис. 31.
|
|
|

Рис. 31
Типовые регуляторы являются идеальными динамическими звеньями. Свойства реальных регуляторов могут значительно отличаться от идеальных и допустимые отклонения регламентированы стандартом на промышленные регуляторы.
Работа регуляторов и системы в целом оценивается показателями качества.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 979; Нарушение авторских прав?; Мы поможем в написании вашей работы!