КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ВВЕДЕНИЕ. Методические указания по выбору структуры и параметров регуляторов для систем автоматического управления
|
|
|
|
Красноярск – 2011
Методические указания по выбору структуры и параметров регуляторов для систем автоматического управления
СТРУКТУРНО-ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ
В.В. Кибардин
Современные системы управления электроприводом постоянного и переменного тока выполняются в настоящее время на базе микропроцессорной техники и позволяют реализовывать сложные алгоритмы управления (стандартные, робастные, нечёткие, генетические и т.д.) и регуляторы. Функциональная схема такой системы представлена на рис. 1. Здесь P – регулятор, O – объект управления ,OC – обратная связь, ХЗ(t) – задающее воздействие, X(t) – выходной сигнал, U(t) – управляющее воздействие, XOC(t) – сигнал обратной связи, f(t) - возмущение, e(t) – сигнал рассогласования.
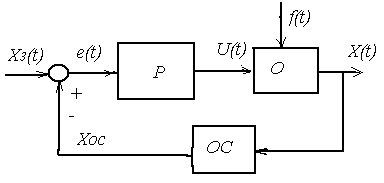
Рис. 1
Кроме объекта управления и регулятора, система содержит датчики, исполнительные механизмы, преобразователи и другие устройства. Статические и динамические свойства системы зависят от характеристик этих элементов.
Регулятор любого контура представляет собой в большинстве случаев последовательное, параллельное или встречно – параллельное корректирующее устройство. Передаточная функция регулятора определяется структурой и параметрами соответствующего звена объекта регулирования, местом приложения возмущающего воздействия и критерием оптимизации контура. В соответствии с последним должно удовлетворяться заданное качество регулирования, под которым понимают переходный процесс при детерминированном входном сигнале, характеризующийся определённым перерегулированием и быстродействием.
Следовательно, необходимо выбрать место включения, структуру и настроечные параметры регулятора, т.е. решить задачу структурно – параметрической оптимизации. Решение этой задачи производится в следующей последовательности:
- определяются статические и динамические свойства объекта управления;
- по заданным показателям качества управления или критерию оптимальности с учётом характера возмущения выбирается алгоритм управления, место включения и структура регулятора;
- производится анализ качества полученной системы управления;
- если рабочая система не удовлетворяет заданным показателям качества, усложняют закон регулирования или её структуру.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 447; Нарушение авторских прав?; Мы поможем в написании вашей работы!