КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Розділ 3. Структурну схему досліджуваної системи. Розрахунок передаточної функції замкнутої системи за каналами задаючої і збурюючої дії. Їх рівняння динаміки і статики
|
|
|
|
Структурну схему системи автоматичного керування будуємо на основі функціональної схеми, отриманої в розділі 1. При цьому функціональні елементи замінюємо структурними ланками, з передаточними функціями отриманих в розділі 2.
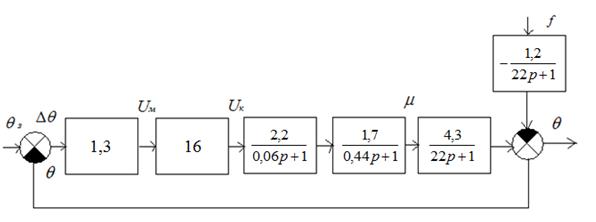
Рис. 3.1. Структурна схема системи автоматичного керування
Блок 1 – передаточна функція моста;
Блок 2 – передаточна функція підсилювача;
Блок 3 – передаточна функція двигуна;
Блок 4 – передаточна функція редуктора;
Блок 5 – передаточна функція за каналом задання;
Блок 6 – передаточна функція за каналом збурення.
Для знаходження передаточних функцій системи за каналами задаючої і збурюючої дії будемо користуватися правилом еквівалентних перетворень структурних схем. Спочатку знайдемо передаточну функцію розімкненої системи:
 - передаточна функція системи за каналом задаючої величини;
- передаточна функція системи за каналом задаючої величини;
 - передаточна функція системи за каналом збурюючої дії;
- передаточна функція системи за каналом збурюючої дії;
W(p)=  )p)
)p)  (p)Wдв(p)
(p)Wдв(p)  Wo(p).
Wo(p).
Зробимо підстановку даних за варіантом у формулу передаточної функції розімкнутої системи:


Знайдемо передаточну функцію замкнутої системи за каналом задаючої величини:

Отже, передаточна функція замкнутої системи за каналом задаючої величини має вигляд:
 =
= 
Щоб отримати диференційне рівняння руху системи за каналом задаючої дії потрібно зробити такі перетворення:

 ‘
‘
 ;
;

Тобто  , де
, де
 =
=  - –зображення вихідної величини,
- –зображення вихідної величини,  (t) = (p) – зображення вхідної величини.
(t) = (p) – зображення вхідної величини.
Диференційне рівняння руху системи за каналом задаючої дії буде мати вигляд:

Рівняння статики буде мати наступний вигляд:

Розрахуємо передаточну функцію за каналом збурюючої дії:
 Щоб отримати диференційне рівняння руху системи за каналом збурюючої дії потрібно зробити наступні перетворення:
Щоб отримати диференційне рівняння руху системи за каналом збурюючої дії потрібно зробити наступні перетворення:
 , Wf(p) =
, Wf(p) =  ; тобто
; тобто

θ(t)  (p) - зображення вихідної величини, f(t)=f(p) - зображення вхідної величини.
(p) - зображення вихідної величини, f(t)=f(p) - зображення вхідної величини.
Зробивши підстановку,отримаємо:

Рівняння статики запишеться: 
Висновок: в даному розділі ми склали структурну схему системи автоматичного керування на основі її функціональної схеми, розрахували передаточні функції замкнутої системи за каналами задаючої і збурюючої дії та записали відповідні їм рівняння динаміки і статики, використавши обернене перетворення Лапласа.
Розділ 4. Аналіз стійкості заданої системи та визначення критичного значення коефіцієнта передачі регулятора, при якому система знаходиться на межі стійкості
Для визначення стійкості можна використати критерії стійкості Гурвіца.
Запишемо передаточну функцію замкнутої системи за каналом жадаючої дії:


Характеристичне рівняння системи:
a3p3+ a2 p2+ a1p+a0=0

Визначник згідно критерію Гурвіца:

 =
= 
Мінори цього визначника будуть мати наступний вигляд:
М1=|  | =
| =
 М2=
М2=  = а2а1-аоа3=
= а2а1-аоа3= 
М3= a0 М2= 335,5056 *  =17859,77
=17859,77
Застосувавши критерій Гурвіца, зробимо висновок про стійкість системи, а саме, оскільки а3>0 i M1>0, М2>0, М3>0, дана система автоматичного регулювання є стійкою.
Критичне значення параметру (коефіцієнта розбиття передачі ккр чи постійного часу Ткр) при цьому система знаходиться на межі області стійкості можна визначити за критеріями Гурвіца.
Запишемо характеристичне рівняння системи:

Запишемо визначник Гурвіца:
Другий мінор цього визначника матиме наступний вигляд:

Прирівняємо його до нуля:

Розв’яжемо рівняння відносно Кп :


Отже, при  система стійка.
система стійка.
Висновок: в даному розділі ми на основі критерію Гурвіца провели аналіз заданої системи на стійкість, визначили критичне значення коефіцієнта передачі регулятора , при якому система знаходиться на межі стійкості та знайшли область стійкостісистеми.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 693; Нарушение авторских прав?; Мы поможем в написании вашей работы!