КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Розділ 2. Запис передаточні функції елементів системи на основі їх диференційних рівнянь
|
|
|
|
Вступ
Список використаної літератури
Висновок
Висновок: Проаналізувавши отримані дані можна зробити що висновок що після введення корегуючої ланки система стане набагато якіснішою. Зменшиться час регулювання на 13 секунд, перерегулювання на 58%, кількість коливань на 12 та усталена похибка на 0,001.
В результаті проведених досліджень та аналізу роботи системи автоматичного регулювання ми склали блок-схему керуванням роботою печі, побудували годограф та визначили запаси стійкості за амплітудою та фазою. На основі передаточних функцій ланок системи побудували перехідну характеристику за якою визначили прямі показники якості системи. Як видно з графіка перехідної характеристики скоригованої системи, час перехідного процесу приблизно рівний заданому. Такий саме висновок можна зробити і щодо перерегулювання. Для стабілізації і демпфування даної системи використовувався метод побудови бажаної ЛАЧХ. За її виглядом визначалася передаточна функція додаткової до системи корегуючої ланки. Отже, для коректування системи достатньо під'єднати зворотній неодиничний зв'язок з коефіцієнтом передачі
1. Теория автоматического управления: Учебник /Под ред. А.В. Нетушила - М.:Высшая школа, 1983. - 432 с.
2. Теория автоматического управления. Учебное пособие /Под ред. А.С. Шаталова - М.:Высшая школа, 1977. - 448 с.
3. Воронов А.А., Титов В.К., Новогренов Б.Н. Основы теории автоматического регулирования и управления: Учебное пособие. - М.:Высшая школа, 1977. - 519 с.
4. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления: Учебное пособие. - М.:Наука, 1979. - 256 с.
5. Цыпкин Я.З. Основы теории автоматических систем: Учебное пособие. - М.:Наука, 1977. - 569 с.
6. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник. – 2-ге вид., перероб. і доп. – К.: Либідь, 2007. – 656 с.
7. Сборник задач по теории автоматического регулирования и управления/Под ред. В.А. Бесекерского - М.:Наука, 1979. - 512 с.
8. Методичні вказівки до виконання курсової роботи з дисципліни „Теорія автоматичного управління лінійними системами” для студентів денної та заочної форм навчання, які навчаються за напрямом 6.050202 „Автоматизація та комп’ютерно-інтегровані технології” /, М.І.Клепач, О.Ф.Кінчур, А.О.Христюк – Рівне: НУВГП, 2012, – 32 с.
Автоматизація виробництва на основі мікроелектронної техніки для розвитку та вдосконалення існуючих та створюваних технологічних виробництв є одним з найважливіших напрямків модернізації виробництва. Особливістю сучасного етапу розвитку автоматизації виробництва є поява та масове застосування якісно нових технологічних засобів на основі мікроелектроніки. Впровадження автоматизованих систем управління технологічними процесами набуває особливого значення у зв'язку із зростанням вимог до швидкості обчислення, переробки і видачі інформації. Тому розробка і дослідження структур і режимів функціонування автоматизованих систем управління технологічними процесами на основі мікроЕОМ є актуальним завданням.
У даній курсовій роботі пропонується проаналізувати систему автоматичного регулювання температури печі. На основі проведення аналізу складемо для кожного структурного елемента керуванням печі диференційні рівняння, які б описували їх роботу, побудуємо структурну схему досліджувальної системи. Згідно диференційних рівнянь елементів печі розрахуємо їх передаточні функції для замкненої системи за каналами задаючої і збурюючої дії, запишемо відповідні їм рівняння динаміки та статики. За вихідними даними користуючись програмним пакетом MatLab побудуємо годограф амплітудно-частотної характеристики розімкнутої системи, визначимо запаси стійкості за амплітудою і фазою; використовуючи передаточні функції елементів управління роботою печі складемо в програмі Simulink електронну модель системи автоматичного регулювання та побудуємо перехідну характеристику САУ за якою визначимо прямі показники якості системи. При отриманні незадовільних параметрів системи проведемо її коригування використовуючи логарифмічні частотні характеристики.
Розділ 1. Опис призначення і принципу дії елементів системи автоматичного регулювання, заданої у вигляді принципової схеми. Аналіз роботи системи у цілому при зміні задаючої або збурюючої величини. Функціональна схема системи
Рис.1.1. Принципова схема системи автоматичного регулювання температури в печі
До складу системи автоматичного регулювання зображеної на принциповій схемі входять наступні елементи: клапан, об’єкт регулювання, термометр опору, електричний міст, підсилювач, двигун та редуктор. Кожен з вказаних елементів виконує в САУ певну функцію.
Клапан регулює подачу палива в об’єкт регулювання залежно від положення. Зміна положення проводиться двигуном через редуктор. Отже, вхідною величною є переміщення клапана, а вихідною - витрата палива.
Об’єкт регулювання представляє собою піч, у якій подане паливо спалюється й утворюється пропорційна масі палива кількість теплоти, що спричиняє підвищення температури в печі. Отримана теплота розсіюється у навколишнє середовище та йде на зміну структури та агрегатного стану речовин у печі. Усталений режим об’єкта регулювання характеризується рівністю кількості тепла, що утворюється в печі внаслідок згоряння палива, і розсіюваної у навколишнє середовище. Вхідною величиною є витрата палива, а вихідною - температура в печі.
Електричний міст складається з резисторів R2,R3, змінного резистора R1 і термометра опору (терморезистор). Термометр опору вимірює фактичну температуру в печі. За допомогою зміни опору резистора R1 задають бажану температуру в печі. Вхідна величина містка – температура в печі,а вихідна – напруга розбалансу.
Підсилювач збільшує вхідну величину (напругу на діагоналі моста  ) в kп разів, формуючи вихідний сигнал
) в kп разів, формуючи вихідний сигнал  .
.
Двигун.Напруга Uk., що подається на якір двигуна постійного струму з незалежним збудженням Uзб, приводить в обертання валу, який зменшує кутову швидкість та збільшує обертовий момент. Залежно від полярності напруги Uk вал дв,
,игуна переміщуватиме клапан в одну чи іншу сторону, збільшуючи або зменшуючи подачу палива. Вхідна величина двигуна з валом є підсилена напруга розбалансу, а вихідна – кут повороту валу який зв’язаний з клапаном.
Редуктор представляє собою пристрій механічно зв’язаний з клапаном, який регулює подачу палива до об’єкту регулювання. Редуктор передає обертовий момент з валу електричного двигуна на клапан, таким чином регулюючи об’єми палива, які подаються в об’єкт регулювання.
Метою роботи приведеної САУ є підтримка температури в об’єкті регулювання на певному заданому рівні.
Схема працює слідуючим чином:
Паливо подається по трубопроводу до клапану, який контролює передачу палива, після клапана в піч (об’єкт керування), в печі відбувається спалення цього палива. В об’єкті керування встановлюється терморезистор. Він є один із плечей допоміжного моста, який живиться напругою U0 . цей міст при заданій температурі за допомогою змінного опору R1 є зрівноваженим. При зміні температури в ту чи іншу сторону виникає розбаланс моста, після чого створюється вихідна напруга, яка подається на підсилювач, а далі на обмотки двигуна де створюючи обертовий момент ротора. Оберти подається через ротор на редуктора від нього до клапана, який при відповідних значення закривається, або відкривається, до встановлення рівноважної напруги.
Робота системи при зміні задаючої величини:
Потрібне нам значення температури в печі ми можемо задавати змінюючи опір потенціометра R1, який ввімкнутий в одну з діагоналей моста. Але при зміні опору порушується рівновага електричного моста, тобто R1∙R3  R2∙Rt, а отже виникає напруга розбалансу, яка подається на підсилювач. Підсилена напруга подається на якір реверсивного двигуна. Оберти валу двигуна передаються на редуктор, а від нього на клапан, який регулює подачу палива до пальника. Двигун працює доти, доки міст не зрівноважиться, тобто доки не виконається умова R1∙R3=R2∙Rt. При встановленні рівноваги напруга розбалансу Um =0, а отже на підсилювач нічого не поступає і реверсивний двигун зупиняється. Клапан залишається в такому положенні до наступних змін температури.
R2∙Rt, а отже виникає напруга розбалансу, яка подається на підсилювач. Підсилена напруга подається на якір реверсивного двигуна. Оберти валу двигуна передаються на редуктор, а від нього на клапан, який регулює подачу палива до пальника. Двигун працює доти, доки міст не зрівноважиться, тобто доки не виконається умова R1∙R3=R2∙Rt. При встановленні рівноваги напруга розбалансу Um =0, а отже на підсилювач нічого не поступає і реверсивний двигун зупиняється. Клапан залишається в такому положенні до наступних змін температури.
Робота системи при зміні збурюючої величини:
Збурюючою величиною може бути зміна температури навколишнього середовища, теплоємність оточуючого повітря та ін. Отже, збурення призводить до порушення теплової рівноваги й зміні температури в печі. Ця зміна температури приводить до зміни опору терморезистора й розбалансу мосту, який усувається шляхом, аналогічним до випадку зміни задаючої величини.
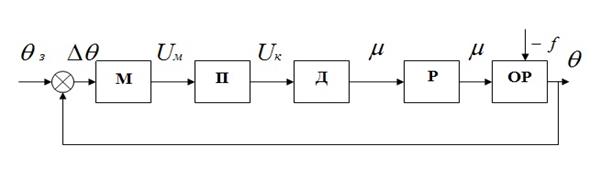
Рис.1.2. Функціональна схема системи автоматичного регулювання температури в печі
М – міст,
П - підсилювач,
Д – двигун,
Р – редуктор,
ОР – об’єкт регулювання,
 - задане значення температурив печі,
- задане значення температурив печі,
 – дійсне значення температури в печі,
– дійсне значення температури в печі,
– вихідна напруга електричного моста,
Uk – напруга керування двигуна,
μ – переміщення клапана,
f – збурення.
Призначення і принцип дії елементів системи автоматичного регулювання температури в печі:
Об’єкт регулювання. Представляє собою піч, до якої подається паливо для спалення й утворюється пропорційна об’єму палива кількість теплоти, що призводить до підвищення температури в печі. Отримана теплота розсіюється у навколишнє середовище та йде на зміну структури та агрегатного стану речовин у печі. Вхідною величиною об’єкта регулювання є витрата палива, а вихідною - температура в печі.
Електричний міст. Складається з резисторів R2,R3, змінного резистора R1 і термометра опору (терморезистор). Термометр опору вимірює фактичну температуру в печі. За допомогою зміни опору резистора R1 задають бажану температуру в печі. Вхідна величина містка – різниця опорів Rt і R1 ,а вихідна – напруга розбалансу.
Підсилювач. Збільшує вхідну величину електричного моста в kп разів, формуючи свою вихідну величину сигнал .
Двигун Напруга Uk, що подається на якір двигуна постійного струму з незалежним збудженням Uзб, приводить в обертання вал,який зменшує кутову швидкість та збільшує обертовий момент. Залежно від полярності напруги Uk вал двигуна переміщуватиме клапан в одну чи іншу сторону, збільшуючи або зменшуючи подачу палива. Вхідна величина двигуна з валом є підсилена напруга розбалансу, а вихідна – кут повороту валу який зв’язаний з клапаном.
Редуктор пристрій, що перетворює високу кутову швидкість обертання вхідного валу в нижчу на вихідному валу,підвищуючи обертовий момент.Передає обертовий момент до клапана,який при відповідних значеннях закривається або відкривається до встановлення рівноважної напруги вимірювального моста.
Клапан регулює подачу палива в об’єкт регулювання залежно від положення. Зміна положення проводиться двигуном через редуктор. Отже, вхідною величною є переміщення клапана, а вихідною - витрата палива. Систему автоматичного регулювання можна класифікувати як звичайну, замкнуту, аналогову, лінійну систему.
Диференціальні рівняння визначаються на основі перетворення Лапласа. Для цього вихідне диференціальне рівняння записується в операторній формі та знаходять відношення зображення вихідної величини до зображення вхідної величини при нульових початкових умовах.
Нехай диференціальне рівняння об’єкта керування має вигляд:
Вихідна величина має дві складові:

Тоді рівняння розбивається на два рівняння. В операторній формі вони мають вигляд:
Де Өm (p),Өf (p), M(p), F(p) - зображення відповідних величин за Лапласом.
Передаточні функції об’єкта:
- за каналом регулюючої величини:
 =
=  ;
;
- 

 за каналом збурення:
за каналом збурення:
 =
=  ;
;
“-” показує, що при збільшенні збурення  регульована величина, в нашому випадку температура в печі
регульована величина, в нашому випадку температура в печі  , зменшується. Тому надалі знак “-” не враховуємо.
, зменшується. Тому надалі знак “-” не враховуємо.
Структурна схема об’єкта буде мати наступний вигляд:
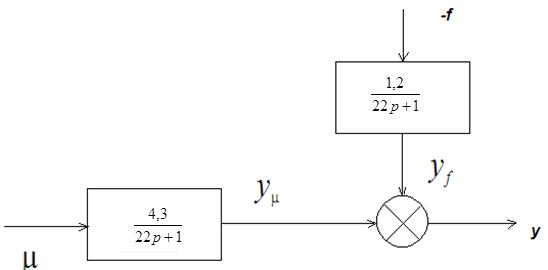
Рис. 2.1. Структурна схема об’єкта регулювання
Аналогічним чином знаходимо передаточні функції інших елементів системи.
Передаточна функція електричного моста:
 ;
;
 - передаточна функція електричного моста;
- передаточна функція електричного моста;
 1,3.
1,3.
Передаточна функція підсилювача:
 ;
;
 – передаточна функція підсилювача
– передаточна функція підсилювача
 16.
16.
Передаточна функція двигуна:
 ;
;


Wдв(p) =  - передаточна функція двигуна;
- передаточна функція двигуна;
Передаточна функція редуктора:


Wдв(p) =  - передаточна функція редуктора;
- передаточна функція редуктора;
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 1219; Нарушение авторских прав?; Мы поможем в написании вашей работы!