КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Розділ 10. Розрахунок інтегральної квадратичної оцінки системи та оптимального коефіцієнта підсилення регулятора
|
|
|
|
Розділ 9. Побудова перехідної характеристики системи за каналом збурюючої дії, шляхом моделювання процесів на ЕОМ
 Для моделювання перехідного процесу за каналом збурення завантажуємо програму MatLab, а точніше пакет розширення SIMULINK.
Для моделювання перехідного процесу за каналом збурення завантажуємо програму MatLab, а точніше пакет розширення SIMULINK.
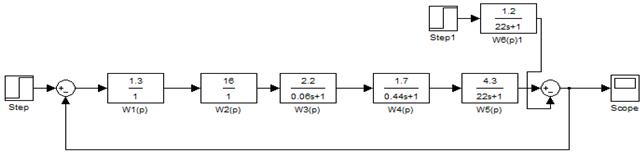
Рис.9.1. Структурна схема системи за каналом збурення
W1(p) – передаточна функція моста; W2(p) – передаточна функція підсилювача; W3(p) – передаточна функція двигуна; W4(p) – передаточна функція редуктора; W5(p) – передаточна функція за каналом задаючої дії; W6(p) – передаточна функція за каналом збурення.
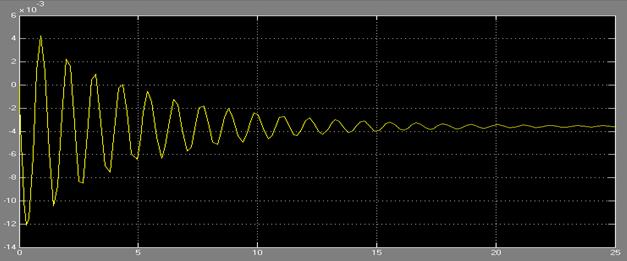 Провівши моделювання процесу за каналом збурення отримали наступну перехідну характеристику
Провівши моделювання процесу за каналом збурення отримали наступну перехідну характеристику
Рис. 9.2. Перехідна характеристика за каналом збурення
Висновок: При аналізі даної схеми ми отримали перехідну характеристику, яка знаходиться у від’ємній півплощині, що характеризує від’ємний (негативний) вплив збурюючого сигналу на систему. Тому на виході системи отримується сигнал менший ідеального.
Інтегральні оцінки якості дають загальну оцінку швидкості затухання та відхилення регульованої величини в перехідному процесі.
Вони діляться на лінійні і квадратичні. До коливних затухаючих перехідних процесів можуть бути застосовані лише квадратичні інтегральні оцінки якості. Найпростіша квадратична оцінка якості керування є функціоналом від динамічної помилки системи і визначається за формулою
 .
.
Динамічна похибка  виражає миттєве відхилення регульованої величини від її усталеного значення
виражає миттєве відхилення регульованої величини від її усталеного значення
 .
.
Інтегральна оцінка може бути виражена через зображення Лапласа від динамічної похибки системи
 .
.
Для визначення квадратичної оцінки за зображенням динамічної похибки на практиці використовують формулу Рейлі, яку отримують з /26/ шляхом заміни 
 .
.
Розроблені різні методи обчислення квадратичної оцінки на основі формули Рейлі. Зокрема, Мак–Леном отримані вирази для квадратичних оцінок якості керування для випадку, коли зображення динамічної похибки системи є дробово-раціональною функцією


- зі степенем полінома чисельника меншим на одиницю від степені полінома знаменника.
За методом Мак–Лена спочатку знаходять зображення динамічної похибки системи за формулою
 ,
,
- де  - передаточна функція замкненої системи,
- передаточна функція замкненої системи,  - зображення вхідної дії.
- зображення вхідної дії.
За виглядом зображення динамічної похибки вибирають вираз для визначення квадратичної оцінки якості. Якщо зображення динамічної похибки системи третього порядку має вигляд
 ,
,
то квадратичну оцінку якості знаходять за формулою
 .
.
Інтегральні оцінки якості використовуються для знаходження оптимальних настроювальних параметрів системи. Наприклад, оптимальне значення коефіцієнта передачі регулятора kр при якому інтегральна оцінка якості приймає мінімальне значення знаходять з умови
 .
.
Аналогічно можна знайти оптимальне значення іншого параметра при фіксованому значенні вже визначеного параметра.
Розрахуємо інтегральну квадратичну оцінку якості системи. Запишемо передаточну функцію замкнутої системи:

Для того щоб знайти інтегральну квадратичну оцінку спочатку знайдемо зображення динамічної помилки:


де - передаточна функція замкненої системи, - зображення вхідної дії,  .
.
За виглядом зображення динамічної похибки вибирають вираз для визначення квадратичної оцінки якості. Якщо зображення динамічної похибки системи третього порядку має вигляд:
то квадратичну оцінку якості знаходять за формулою:
Прирівнявши коефіцієнти при відповідних степенях p отримаємо:

 ,
,  ,
,  ,
,  ,
,  ,
, 

Знайдемо оптимальне значення коефіцієнта підсилення kп, для цього приймемо його за невідомий. В результаті отримаємо:

 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,  .
.
Вираз для обчислення інтегральної квадратичної оцінки у цьому випадку запишеться наступним чином:

Визначимо частинну похідну скориставшись програмою Matlab:
>> c=[251725618.97 655504085.17 60916463.88 1444620.13]
c =
1.0e+008 *
2.5173 6.5550 0.6092 0.0144
>> z=[-56335696.96 101641890.22 273347832.99 26211079.71 1255197.15 30040.32 287.51]
z =
1.0e+008 *
-0.5634 1.0164 2.7335 0.2621 0.0126 0.0003 0.0000
>> [p,r]=polyder(c,z)
p =
1.0e+017 *
0.4254 0.9654 -2.5153 -3.8264 -0.6755 -0.0476 -0.0017 -0.0000 -0.0000
r =
1.0e+016 *
0.3174 -1.1452 -2.0467 5.2614 7.9906 1.4581 0.1379 0.0082 0.0003 0.0000 0.0000 0.0000 0.0000
де p – чисельник виразу частинної похідної
Прирівняємо чисельник отриманої похідної до 0 і знайдемо корені рівняння
cкориставшись Matlab:
>> m=roots(p)
m =
1.0e+002 *
-9.8684
4.8450
0.1023
-0.0481
-0.0480 + 0.0003i
-0.0480 - 0.0003i
-0.0477 + 0.0002i
-0.0477 - 0.0002i
-0.0475
Оскільки коефіцієнт підсилення не може бути ні від’ємним, ні комплексним, то оптимальні значення коефіцієнта передачі регулятора:


Для цих значень шляхом моделювання в Simulink побудуємо перехідну характеристику.
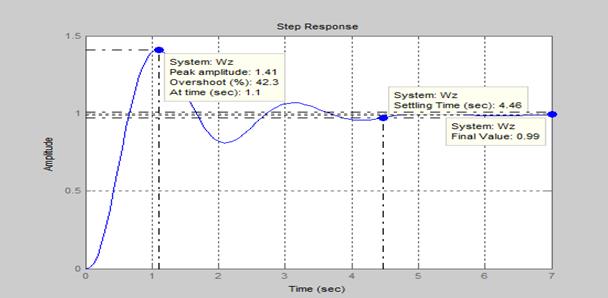
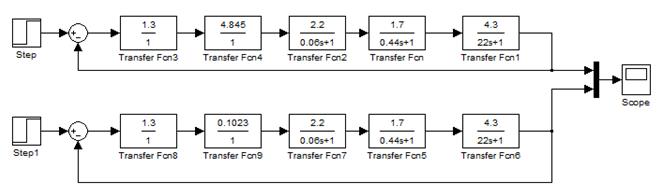 Рис 10.1. Модель САР температури при оптимальних коефіцієнтах передачі регулятора
Рис 10.1. Модель САР температури при оптимальних коефіцієнтах передачі регулятора
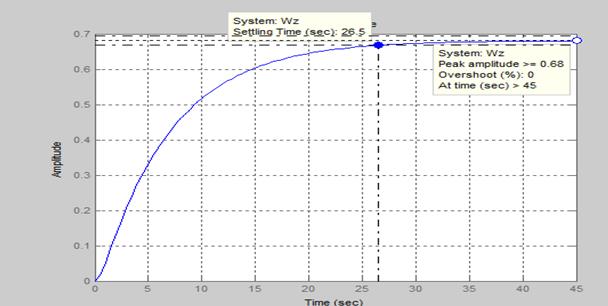 Рис 10.2. Перехідна характеристика при
Рис 10.2. Перехідна характеристика при
Рис 10.3. Перехідна характеристика при
Висновок: На основі побудованих графіків ми бачимо, що при перехідна характеристика має перерегулювання рівне 42,3%, але скорочується час регулювання до 4,46 с, усталена похибка 0,002. При перерегулювання відсутнє, але з’являється значна усталена похибка 0,32 та зростає час регулювання до 26,5 с.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 663; Нарушение авторских прав?; Мы поможем в написании вашей работы!