КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Формирование частотных характеристик замкнутой системы
|
|
|
|
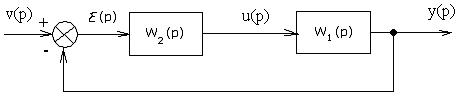
Выше мы обсудили формирование частотных характеристик разомкнутой системы, соответствующих передаточной функции разомкнутой системы (косвенный метод проектирования). В этом разделе мы рассмотрим формирование частотных характеристик замкнутой системы (см. рис. ниже), соответствующих функции чувствительности и дополнительной функции чувствительности, с помощью выбора регулятора W2(p) (прямой метод проектирования).
Как мы уже ранее показали, функция чувствительности S(p) является хорошим индикатором свойств замкнутой системы управления. Главное ее достоинство состоит в том, что если мы хотим, чтобы она принимала малые значения, то достаточно ограничиться рассмотрением ее модуля | S( )|; нет необходимости беспокоиться об ее фазе.
)|; нет необходимости беспокоиться об ее фазе.
Постановка задачи. Типичные требования к качеству системы в рамках S включают в себя:
1. Минимально допустимая полоса пропускания  ;
;
2. Максимально допустимая установившаяся ошибка или порядок астатизма;
3. Вид (форма) | S()| в выбранной полосе частот;
4. Максимальное значение модуля S, | S()| .
.
Последнее требование предотвращает усиление шума на высоких частотах и вводит запасы робастности. Как правило, выбирают  = 2.
= 2.
Условие 4 можно записать с помощью  (H-бесконечность) нормы как || S()||
(H-бесконечность) нормы как || S()||
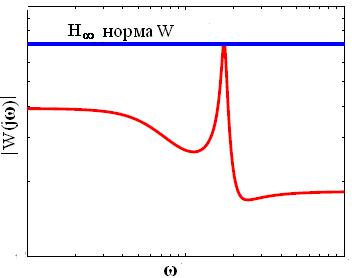
 . Кстати, норма (бесконечная форма) ПФ W(p) определяется как
. Кстати, норма (бесконечная форма) ПФ W(p) определяется как
|| W(p)|| =
=
( см.рисунок ниже ). Здесь |c| означает абсолютное значение комплексного числа c.
Все эти четыре требования можно аккумулировать (охватить) с помощью определения верхней границы 1/Gs(p) для модуля S, где Gs(p) функция веса, определяемая проектировщиком системы, и как результат все требования записать в виде одного требования
| S()| (1)
(1)

 ||
|| ||< 1. (2)
||< 1. (2)
Последнее условие вытекает из определения нормы и словами его можно выразить следующим образом:
норма взвешенной функции чувствительности || должна быть меньше, чем единица.
Рассматриваемая задача является разновидностью задачи - оптимального управления, которое заключается в том, чтобы найти оптимальный регулятор W2(p), минимизирующий величину
 || Gs S(W2 )||
|| Gs S(W2 )||  <1. (3)
<1. (3)
В выражении (3) sup есть символ операции supremum, которая означает, что конечный результат есть наибольшая верхняя граница.
На рис. 1 как пример показано, что чувствительность | S()| на некоторых частотах превышает верхнюю границу 1/Gs(p). Поэтому полученная в результате взвешенная функция чувствительности больше единицы на тех же частотах, как видно на рис. 2.
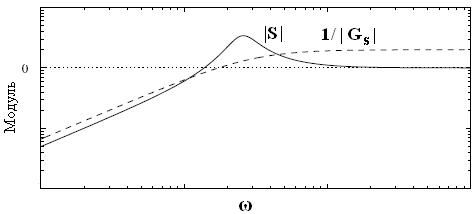
Рис. 1
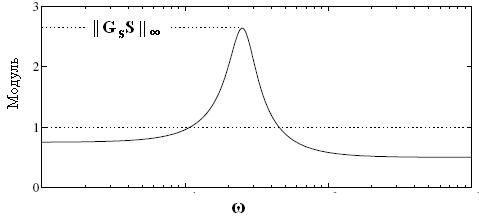
Рис. 2
Заметим, что обычно не используют логарифмический масштаб для модуля, когда изображают график взвешенной передаточной функции такой, как ||.
Выбор функций веса. Асимптотическая и точная логарифмические частотные характеристики типичной верхней границы  представлены на рис. 3. Передаточная функция, соответствующая функции веса
представлены на рис. 3. Передаточная функция, соответствующая функции веса  обычно может быть представлена как
обычно может быть представлена как

и мы видим, что (верхняя граница | S()|) равна A (типично малая величина  ) на низких частотах и равна
) на низких частотах и равна  > 1 на высоких частотах, и асимптота пересекает 1 на частоте , примерно равной требуемой полосе пропускания.
> 1 на высоких частотах, и асимптота пересекает 1 на частоте , примерно равной требуемой полосе пропускания.
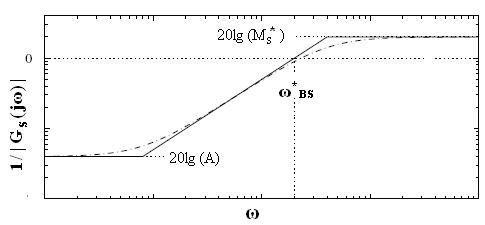
Рис. 3
Такой выбор функции веса определяет запретную область для функции чувствительности проектируемой системы (рис. 4).
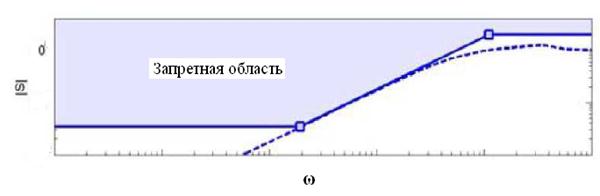
Рис. 4
Замечание. Уменьшение функции чувствительности понижает влияние возмущающего воздействия и повышает точность воспроизведения задающего воздействия за счет увеличения полосы пропускания.
Смешанная чувствительность. Требование || ||< 1 определяет нижнюю границу полосы пропускания  , но никак не верхнюю
, но никак не верхнюю  ,
,
(см. рис. ниже)
 и такое требование не дает нам возможность установить желаемый наклон ЛАЧХ разомкнутой системы L(
и такое требование не дает нам возможность установить желаемый наклон ЛАЧХ разомкнутой системы L( )=20lg|W(j)| за пределами полосы пропускания . Чтобы сделать это, нам потребуется другая ПФ замкнутой системы, а именно, дополнительная функция чувствительности
)=20lg|W(j)| за пределами полосы пропускания . Чтобы сделать это, нам потребуется другая ПФ замкнутой системы, а именно, дополнительная функция чувствительности
T=1-S=W1(p)W2(p)S(p).
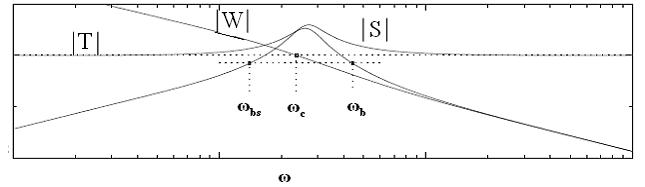
Например, можно установить верхнюю границу  модуля |T(j)|, и тем самым обеспечить требуемое значение максимума дополнительной функции чувствительности, другими словами, показателя колебательности M системы (обычно рекомендуемое значение M=1.25), и обеспечить достаточно быстрый спад L() на высоких частотах (рис. 5)
модуля |T(j)|, и тем самым обеспечить требуемое значение максимума дополнительной функции чувствительности, другими словами, показателя колебательности M системы (обычно рекомендуемое значение M=1.25), и обеспечить достаточно быстрый спад L() на высоких частотах (рис. 5)
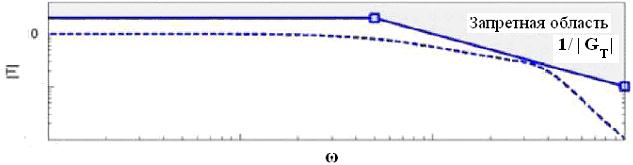
Рис. 5
Замечание. Уменьшение дополнительнлй функции чувствительности уменьшает влияние шума измерения и повышает робастность системы к мультипликативной неопределенности (см. ниже).
Также можно ограничить модуль управления
u(p)= W2(p)S(p)[v(p)-W1(p)f(p)]
( другими словами,ограничить функцию чувствительности управления W2(p)S(p)) с помощью установления верхней границы  для |W2(p)S(p)| ( рис. 6), где
для |W2(p)S(p)| ( рис. 6), где
 .
.
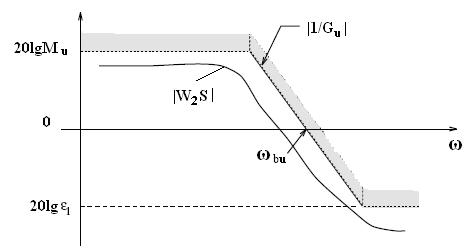
Рис. 6
Замечание. Уменьшение функции чувствительности управления уменьшает влияние шума измерения на управляющее воздействие, обеспечивает робастность системы к аддитивной неопределенности (см.ниже) и влечет умеренные значения АЧХ управляющего устройства.
Смешанная чувствительность. В силу фундаментального ограничения
S()+T()=1
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 524; Нарушение авторских прав?; Мы поможем в написании вашей работы!