КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 32
|
|
|
|
Синтез управляющего устройства с помощью Q – параметризации (Q – синтез)
Формулы (3) и (4) положены в основу продвинутого метода синтеза систем управления, так называемого Q - синтеза. Основная идея этого метода: найти УУ Q(p) с помощью (4) и затем получить ПФ классического УУ, используя (3), и тем самым перейти к классической структуре системы с единичной обратной связью.
Преимущество такого метода заключается в том, что ПФ классической системы с обратной связью
нелинейна относительно ПФ УУ (регулятора)  , что затрудняет поиск для достижения желаемых свойств замкнутой системы. При условии
, что затрудняет поиск для достижения желаемых свойств замкнутой системы. При условии  ПФ для системы с внутренней моделью
ПФ для системы с внутренней моделью
T(p)= 
линейна в отношении УУ Q(p) (или, как говорят, T(p) аффинна в Q(p)), чтопозволяет для простых моделей решить задачу синтеза ручным путем. При этом устойчивость замкнутой системы гарантирована, если устойчиво УУ Q(p) и  , т.е. соотношение (3) известно, как параметризация всех регуляторов, обеспечивающих устойчивость замкнутой системы, в случае устойчивых объектов. Ключевой момент параметризации (3), что она описывает все возможные УУ (регуляторы), обеспечивающие устойчивость замкнутой системы для данного объекта .
, т.е. соотношение (3) известно, как параметризация всех регуляторов, обеспечивающих устойчивость замкнутой системы, в случае устойчивых объектов. Ключевой момент параметризации (3), что она описывает все возможные УУ (регуляторы), обеспечивающие устойчивость замкнутой системы для данного объекта .
Кстати, функция чувствительности также афинна в Q(p),
S(p)=1 - Q(p)W1 (p).
При этом передаточная функции по возмущению и передаточная функция, связывающая управление и шум измерения оказываются соответственно равными

Все ПФ T(p),  ,
,  ,
,  являются устойчивыми, если устойчивы объект управления и УУ Q(p). При этом гарантирована внутренняя устойчивость системе управления, и регулятор с ПФ
являются устойчивыми, если устойчивы объект управления и УУ Q(p). При этом гарантирована внутренняя устойчивость системе управления, и регулятор с ПФ
стабилизирует систему.
Следовательно, Q –параметризация или аффинная параметризация в общем случае облегчает решение задачи синтеза системы управления, в частности получения робастной системы.
Однако по нескольким причинам невозможно найти инверсию (4) даже в том случае, когда модель ОУ является точной.
а) ОУ является устойчивым и минимально-фазовым
Если  является строго физически осуществимой, то инверсия имеет больше нулей, чем полюсов, т.е. физически неосуществима. Альтернативно можно выбрать
является строго физически осуществимой, то инверсия имеет больше нулей, чем полюсов, т.е. физически неосуществима. Альтернативно можно выбрать
 (5)
(5)
где n выбирается достаточно большим так, чтобы сделать ПФ Q(p) физически осуществимой. Параметр  влияет на быстродействие системы.
влияет на быстродействие системы.
Пример. Модель объекта первого порядка
Пусть
Выбираем n =1. При этом
Как видим, получаем ПИ-регулятор.
б) ОУ является устойчивым и неминимально-фазовым
Если ОУ является неминимально- фазовым имеет неустойчивые нули (правые нули), то его инверсия Q(p) будет неустойчивой. Альтернативно можно удалить неустойчивый множитель (-( (ему соответствует неустойчивый нуль z=1/
(ему соответствует неустойчивый нуль z=1/  ) из числителя ПФ модели ОУ или заменить его на множитель (. В последнем случае изменяется только фазо-частотная характеристика псевдообъекта, а его АЧХ не отличается от модели объекта.
) из числителя ПФ модели ОУ или заменить его на множитель (. В последнем случае изменяется только фазо-частотная характеристика псевдообъекта, а его АЧХ не отличается от модели объекта.
Пример.
Пусть 
При этом
Как видим, получаем ПИ-регулятор.
в) ОУ содержит чистое запаздывание
В этом случае реализовать инверсию оказывается невозможным, т.к. она должна предсказывать будущие значения входа, должна быть идеальным предсказателем. Альтернативно можно удалить запаздывание перед инвертированием. Другой подход приводит к предиктору Смита.
Рассмотрим модель ОУ

Пусть  =
= будет УУ, которое мы используем без учета запаздывания. Тогда
будет УУ, которое мы используем без учета запаздывания. Тогда
 . (6)
. (6)
Эмпирическое правило говорит нам о том, что именно это Q(p) нам следует использовать также для объекта с запаздыванием. При этом получаем

Эта модификация с учетом запаздывания известна как компенсация чистого запаздывания (рис. 3), впервые полученная Отто Смитом. Дело в том, что при  , ПФ замкнутой системы
, ПФ замкнутой системы

не содержит звена чистого запаздывания  в знаменателе.
в знаменателе.
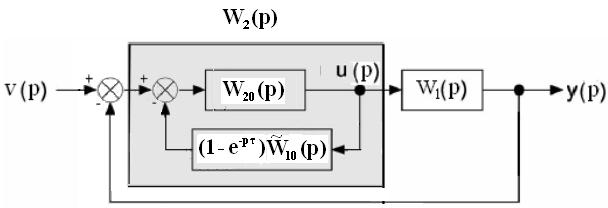
Рис. 3
На рис. 4 изображена структурная эквивалентная схема системы управления с обратной связью, где Q(p) определяется по (6). Что дает предиктор Смита? При
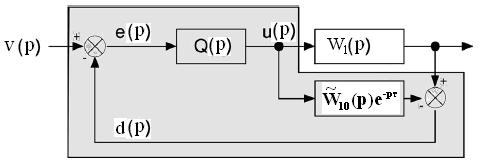
Рис.4
одном и том же перерегулировании длительность переходного процесса значительно сокращается (жирные линии) по сравнению со стандартным ПИ-регулятором (тонкие линии), включенном вместо W2 (p) (рис. 4).
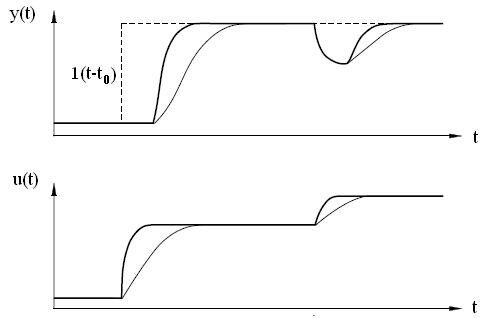
Рис. 4
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 467; Нарушение авторских прав?; Мы поможем в написании вашей работы!