КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Баланс мощности колесной машины
|
|
|
|
Ко
Р — Р 4-P-L-P4-P
| (136) (137) 435 |
'КО KD / I 'Г»'
| PJ~rPr |
| :-:- р. — I |
Для случая движения без тяговой нагрузки (Рчр — 0)
Р,, -! Р ИЛИ Р П — Р
-Pw называется избыточной силой тяги.
где разность Pw
28*
При установившемся движе-
нии (jPj=0) вся избыточная си-
ла тяги расходуется на преодо-
ление сопротивления дороги
Рко—PW=Pф • Приближенно счи-
тая для малых углов cos а«1,
можно записать, что i|)=/±sin а
или i|3=f-f t, где i=tga»sina —
величина уклона дороги в сотых
долях или процентах. Угол пре-
одолеваемого подъема определит-
ся из формулы:
sin a = г|з — f. (138)
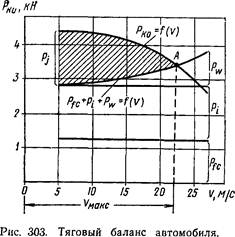
Тяговый баланс автомоби-
ля в графическом виде (рис.
303) представляет зависимость
PKo=f{v). Суммирование орди-
нат сил Р/с, Рг, Р w определяет кривую суммы сил сопротивлений дви-
жению автомобиля с постоянной скоростью (Р}=0) вида Pfc-j-P,-}-
Разница ординат Рко—(Pjc-\-Pi-\-Pw) для заданной скорости есть
сила Pj, которую можно преодолеть при разгоне автомобиля.
Пользуясь графиком тягового баланса, определяют соотношение
между полной окружной силой колес и силами сопротивления движению
машины, находят возможное ускорение разгона, максимальное сопро-
тивление дороги, которое может преодолеть машина, ее максимальную
скорость Умакс.
Максимальная скорость движения определяется точ-
кой А пересечения кривых PKo—f(v) и Р/с+Р»-(- Pw—f(v)
при Pj=0.
Баланс мощности дает количественную характеристику затрат мощ-
ности на преодоление различных сопротивлений, возникающих при ра-
боте машины.
Если обе части уравнения (130) тягового баланса по толкающей
силе (кН) умножить на поступательную скорость v (м/с), то получим
уравнение баланса мощности, перенесенной ведущими колесами на ос-
тов машины (кВт):
WDeр = Р* v = ± Nj ± Nt + Nw + Nf+ AU (139)
где ЛГПер = ^>вУ—мощность, видоизмененная колесами в поступательное движение и пе-
ренесенная на остов машины; ±Ni = G' sin a f — мощность, израсходованная на увели-
чение потенциальной энергии машины на преодоление подъема (+) или возвращенная
через остов колесам при спуске (—); ±Nj = PjV — мощность, аккумулированная
машиной прн разгоне (+) или подведенная к затормаживаемым колесам (—); Nw=
= kwFv3 — мощность, затрачиваемая на сопротивление воздуха; Nf = Pj v — мощность,
затрачиваемая на сопротивление ведомых колес качению; NKp = PKVv — тяговая мощ-
ность, перенесенная на агрегатируемую машину, орудие или прицеп.
Аналогичным образом из уравнения (134) определяется баланс
мощности (кВт) по полной окружной силе, подведенной к ведущим ко-
лесам (за исключением мощности буксования Mcoso):
PK0v-Ma>^- = Mu(l-s6)=± N. ± Nt Nw + Nfe -f NKp, (140)
Vx г Vs
|
где NfC — мощность сопротивления всех колес машины качению.

|
При движении нормальные реакции опорной плоскости изменяют-
ся под действием сил и моментов, приложенных к машине.
Для определения нормальных реакций на колеса машины 4X2 в
общем случае ускоренного движения и без учета сопротивления ка-
чению колес составим уравнение проекций сил на опорную плос-
кость и на плоскость, нормальную к ней, а также уравнение моментов
относительно точки С проекции центра переднего колеса на опорную
плоскость (см. рис. 302,а):
ЪРХ =PW± Pj ± G' sin а — Рв = 0;
2Рг = Rz + Я; — G' cos а = 0;
| ■ hw и продольный снос нормальной реакции в = 0 |
| (148) (149) (150) |
| (151) |
2М„ = aG' cos а f (Р ± P. ± G' sin a)h — R,L -
принимая, что /г;
(см. рис. 301).
Из уравнений (145), (146), (147) следует:
PB = PW±P,±G' sin а;
= С cos а — Rz-
aG' cos се + Рв h — RZL — Рв гл = 0,
откуда
D _ aG ' cos «+ Рв № — га)
Заменив для случая максимальной толкающей силы по сцеплению
Pt^tpRz, получим:
D aG' cos 9. + <fRz (ft — гд)
--------------- 1---------------- '
RZL — tpRz (h—Гд) = aG' cost*,
aG' cos a aG' cos a
(152)
L — q>A + флд
Из уравнения (149), (152)
R' = G' cos a — R = G' cos a
L + <f(r„-h)
aG' cos a
L — (fh+ флд
G' cos «[I — a -f ф (гд — ft)]
(153)
Z.+ф(/-д —/i)
Из формул (152), (153) следует, что нормальные реакции дороги
иа колеса движущейся машины зависят от ее конструкции и условий
движения. Конструктивными параметрами, оказывающими влияние на
реакции Rz и являются продольная база L, продольная а и верти-
кальная h координаты центра тяжести и сила тяжести G' машины.
Условия движения определяются углом подъема или уклона а и
коэффициентом сцепления ср.
Изменения реакций опорной плоскости на колеса движущейся ма-
шины определяются коэффициентами продольного перераспределения
нагрузки m и которые представляют собой отношения реакций опор-
ной плоскости на колеса в общем случае движения к их значениям для
неподвижной машины, стоящей на горизонтальной опорной поверхно-
сти. Из определения и формул (144), (152), (153) следует:
| (145) (146) = (И7) |
L cos a
| ■й)1 |
1П=:----------- —; (1о4)
L ф (Гд — h)
| mx |
a cos а [/. — a -- ф (гд -
(155)
(L - a) [L + ф (гд - Л)1
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 707; Нарушение авторских прав?; Мы поможем в написании вашей работы!